
中心議題:
- 關鍵子系統的設計原理
- 幾種PCM模塊長久性測試
解決方案:
- 構建虛擬儀器平臺實現計算機的全數字化采集測試分析
- 多層CAN總線通信技術、虛擬儀器技術和嵌入式計算機系統
1、引言
汽車發動機控制模塊(PCM)是汽車的控制神經中樞,直接影響到汽車的動力性和燃油經濟性和尾氣排放。隨著汽車電子工業的發展,PCM已經成為汽車的一個標準配置。由于PCM系統十分復雜,工作環境極為惡劣,其可靠性至關重要,因此,PCM耐久性測試是開發汽車發動機PCM的重要支撐條件。
上世紀80年代,幾家國際上知名的PCM模塊制造公司如博世、西門子、德爾福、偉世通,針對自己的產品相繼進行了PCM耐久性測試技術的研究,并研制出了相應設備。由于這類設備仍然沿用的是20多年前的設計體系,已經不能適應日新月異的汽車電噴發動機技術的發展,整體技術平臺落后,存在一些不可克服的缺陷,例如不能兼容不同廠商的PCM模塊,不能設置自動循環策略,不能現場配置模擬信號類型和參數等。目前,我國自主開發的汽車電子產品正處于加速發展階段,但是由于我國汽車工業起步較晚,自身技術落后,科研能力不強,現有的PCM 技術來自國外,有關PCM的耐久性測試技術在國內還屬于空白,只有少數的高校圍繞汽車電噴發動機開展了故障診斷、信號測試、運行機仿真等方面的研究,沒有形成成套技術。
本文介紹了汽車PCM耐久性測試系統的整體設計思路和測試規范,重點討論了關鍵子系統的設計原理,并通過原型樣機對幾種PCM模塊長久性測試,驗證了該系統的可靠性和通用性。
2、整體構思
2.1 PCM工作原理
汽車發動機控制模塊(PCM)是汽車控制系統的核心部件,主要由輸入電路、模擬信號、數字信號轉換器、微機、輸出回路等五個部分組成。其作用是接收各種傳感器信號,經微機的運算、處理,向執行器發出指令,接通各執行器的接地線,使其通電而工作,以精確控制燃油供給量、點火提前角和怠速空氣流量。
2.2 PCM耐久性測試系統的設計思路
本文以電噴發動機的控制技術為基礎,采用多層CAN總線通信技術、虛擬儀器技術和嵌入式計算機系統,設計了一個通用開放的PCM耐久性測試系統。它主要由工業控制計算機(工控機)、信號發生子系統、模擬負載子系統、負載監測子系統、大功率程控電源、環境實驗箱、現場總線通信子系統、應用軟件和數據庫管理系統等組成。其硬件系統與原型樣機如圖1、2所示。
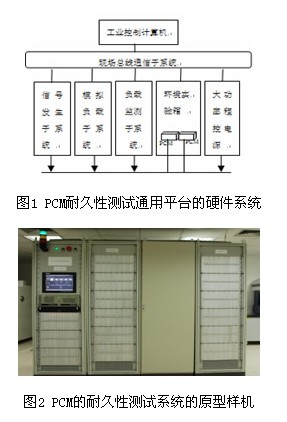
該測試系統的測試原理:以PCM為測試對象,由工控機根據測試類型和測試項目的不同發送設置指令,控制環境變量和大功率直流電源,快速切換汽車傳感器信號和模擬負載連接,并及時向負載監測系統發送讀取指令,在線監測PCM運行狀態。
2.3 PCM耐久性測試規范
耐久性測試規范是PCM耐久性測試的依據,關系到PCM整體質量。為了提高PCM正常運行時的可靠性和耐久性,必須建立一套能夠最大限度激發 PCM失效的測試規范。本系統建立耐久性測試規范的原則:(1)充分考慮引起PCM 失效的多種應力參數;(2)保證足夠的測試時間以驗證PCM模塊在預計的壽命內有足夠的可靠性。
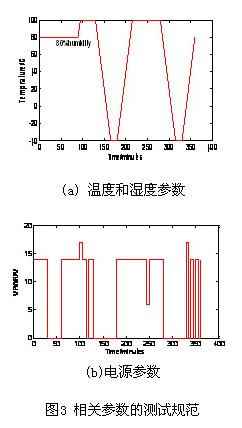
根據PCM各種工況下的極限環境,確定了溫度、濕度、電源電壓等重要參數,建立了一套周期為6小時的測試規范,具體如圖3所示,并通過了利用DSPACE快速開發平臺和NI虛擬儀器平臺建立的耐久性測試實驗平臺的檢驗。
 [page]
[page]
3、PCM耐久性測試系統的主要構架
本系統采用研華工控機,通過安插調理放大器、A/D、D/A卡,安裝Visual C++、LabVIEW等開發應用軟件,構成一個虛擬儀器平臺,實現了計算機的全數字化的采集測試分析。此外,系統選擇了安捷倫6691A型大功率程控電源用于模擬蓄電池和發電機工作,設計了能容納多個PCM的環境實驗箱。
3.1 信號發生子系統
在相關文獻中,信號發生裝置均只針對特定的PCM而設計,靈活性較差。該子系統利用虛擬儀器技術,主要結構是一個以ARM單片機和CPLD為硬件框架的嵌入式計算機系統。它只要分配給各個信號發生模塊不同的標識(ID),就可通過現場總線進行系統擴展,實現多模塊的信號發生子系統網絡。
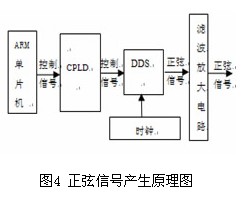
采用DDS技術在當前的測試測量行業已是一種主流的做法,其頻率精度可隨相位累加器的位數而定。本系統采用單片機+專用DDS芯片的方式產生正弦信號,其原理如圖4所示,ARM單片機向CPLD 發出控制命令,CPLD 在時鐘下譯碼后產生DDS的控制信號,產生出相應頻率的正弦波信號,該正弦信號經過濾波放大后,輸出相應幅值的正弦信號。
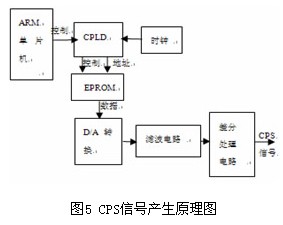
曲軸位置信號(CPS)是PCM控制點火系統中最主要的傳感器信號,為適應多種PCM的需求,設計采用CPLD和DA的方式產生。CPS信號產生原理如圖5所示,在EPROM中存有一個周期的正弦表數據,當需要產生 CPS信號時,ARM單片機對CPLD進行設置,CPLD根據接收的控制命令,通過時鐘計數,產生讀存儲器的信號,并向EPROM提供合適的地址信號和控制信號,EPROM輸出相應地址的數據,經D/A轉換,變成單端CPS模擬信號,然后經濾波電路和單端轉差分處理電路,輸出CPS差分信號。在實際的電路實現中,對CPS信號的控制可由計算機通過CAN總線向ARM發出控制命令進行設置,因此,即使ARM芯片在運行過程中復位,電路仍能輸出正確的CPS信號,以確保測試周期的正常進行。
該子系統還針對各類PCM模塊的需求,設計了兩種VREF/2信號的產生方式:電阻分壓方式和運算放大器分壓;同時,利用555時基電路和濾波放大電路設計了PWM發生器;此外,該子系統還采用電阻分壓加集成運放隔離的方式產生PCM需要的小幅值固定電壓信號(比如1.0V)。
3.2 模擬負載子系統
該子系統主要模擬PCM連接的點火線圈、噴油、碳罐電磁閥、廢氣再循環等輸出負載。該子系統是一個能模擬各種PCM輸出負載的開放式負載系統,并可通過現場總線進行系統擴展。
本文綜合分析了PCM負載的公共性和特殊性,設計了兩種類型的負載板:公共負載板和特殊負載板。模擬負載模塊有多塊模擬負載板組成,并同負載監測模塊一起安插在負載箱里。當需要進行具體項目的測試時,可通過繼電器矩陣完成負載的切換工作。此外,還采用了光電隔離方式將PCM輸出信號轉化為負載監測子系統能接收的+5V TTL信號。
3.3 負載監測子系統
該子系統也是一個基于ARM單片機和CPLD為主要硬件框架的嵌入式計算機系統,并可通過現場總線,進行系統擴展。該子系統通過實時讀入模擬負載子系統中監測信號,監測PCM在耐久性測試過程中輸出的所有負載信號的變化情況,包括信號的變化周期,部分重要信號輸出的時序等,并將監測結果,通過現場總線上傳到工控機。
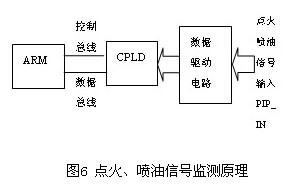
點火和噴油信號是汽車發動機中的關鍵信號,其周期和時序直接關系到汽車的運行狀態,因此監測它們的周期和時序尤為重要。本系統監測原理圖如圖6 所示,對于點火信號的監測,主要是監測它與CPS信號的同步,以及兩個或四個點火信號之間的時序關系。當CPLD尋找到點火信號與CPS同步的起始點后,根據輸入的PIP_IN信號,對各點火信號進行計數。每當一個點火周期完成后,在下一個點火周期向ARM 單片機產生一個中斷信號。該中斷信號觸發ARM 單片機進入中斷處理程序,在該中斷程序中,ARM單片機讀入對各點火信號的計數值,判斷點火信號的時序和周期,并設置點火信號正常與否的標志。對于噴油信號的監測,主要是監測它與CPS信號的同步,以及它們之間的時序關系。當PIP_IN信號中四個噴油信號中任何一個信號的下降沿到來時,CPLD都會監測其它三個噴油信號的狀態,如果其它三個噴油信號的狀態正常,即給出噴油信號正常標志,反之給出噴油信號異常標志。
對于PCM模塊中頻率變化較低(比如2Hz)的慢速信號,本系統采用RS232的總線讀取方式由ARM 監測它們的周期變化。
3.4 現場總線通信子系統
由于整個系統的各個子系統之間需要雙向傳送大量的數據,因此對系統的通信性提出了很高的要求:一方面要有較高的通信速率;另一方面又要有較靈活的協議轉換。由于CAN總線具有突出的可靠性、實時性和靈活性,因而得到了業界的廣泛認同和運用。本系統采用以CAN總線為主,兼有K-LINE、 GPIB、RS485、245總線的現場總線通信子系統,并可靈活組成多個通信子網,完成多模塊測試的要求。本系統采用兩個CAN子網(CAN0、 CAN1),對于每個PCM而言,信號發生模塊和負載監測模塊、PCM組成一個通信子網CAN 1。工控機通過通信子網CAN0將各個子網連接在一起。
信號發生子系統與工控機的CAN通信:(1)設置信號發生模塊,其設置范圍主要是CPS類型、啟動CPS、啟動正弦信號的產生及開關量輸入繼電器;(2)控制和讀取PCM故障代碼。信號發生模塊是工控機與PCM通信的中轉站。當工控機設置PCM或者在運行過程中讀取PCM模塊的故障信息時,首先通過 CAN0向信號發生模塊發送指令,信號發生模塊接收到該指令后,只將ID更改后通過CAN1發送到PCM模塊。同理,信號發生模塊接收到PCM返回的 CAN報文后,只將ID更改后通過CAN0發送給工控機。考慮到不同PCM類型的通信接口差異,在信號發生模塊和PCM之間還添加了KLIN總線。當要設置PCM或讀取PCM的故障代碼時,信號發生模塊通過CAN0接收指令,轉化成KLIN報文后,發送到PCM模塊;同理,從PCM返回的KLIN報文,由信號發生板轉換成CAN報文后通過CAN0返回到工控機。
負載監測子系統與工控機之間的CAN通信:(1)設置繼電器矩陣。工控機向負載監測模塊發送設置繼電器矩陣的指令,負載監測模塊接收到指令后,將繼電器矩陣信息傳遞給對應模擬負載模塊;(2)讀取負載監測信息。在系統工作時,工控機不斷向負載監測模塊發送查詢負載監測信息的指令,負載監測模塊接收該指令后,將當前的PCM負載監測數據組合成CAN報文的形式發送給工控機。
此外,模擬負載子系統通過RS245總線與負載監測子系統相連,將繼電器矩陣信息傳輸給各個模擬負載模塊,完成負載的切換工作;大功率程控電源通過 GBIP與工控機相連,接收工控機的電源設置;環境實驗箱通過RS485 與工控機連接,接收其設置命令,調節環境溫度和濕度。
4、結論
目前,該系統已成功用于長安CB系列的PCM、STC 1××和2××系列的PCM耐久性測試,驗證了系統的通用性及可靠性。由于摩托車的PCM與汽車PCM原理相近,因此,它同樣適合摩托車PCM耐久性測試。雖然該系統可能還存在一些缺陷,但通過不斷地改進和升級,必將為開發汽車發動機控制系統提供扎實的設備保障。




