

- 汽車雷達網絡的構成原理
- 汽車雷達網絡關鍵技術解決方案
- 汽車雷達網絡的發展現狀
- 近距離傳感器設計
- 雷達組網同步控制
- 內置運動目標位置估算算法
但是傳統的單一雷達傳感器還是存在著諸如探測范圍小、可靠性低等缺點。特別是在復雜的行駛狀況下,并線、移線、轉彎、上下坡以及道路兩旁的靜態護欄、標志牌、行人都會使得雷達對主目標的識別十分困難,誤報率很高。
要想完全解決好雷達的誤報問題,還需要采取多傳感器之間的信息融合技術。通過將各種雷達傳感器集成在一起構成的一個網絡系統綜合了各種傳感器的優勢,實現了信息分析、綜合和平衡,利用數據間的冗余性和互補特性進行容錯處理,克服了單一傳感器可靠性低、有效探測范圍小等缺點,有效地降低了雷達的誤報率。由此構成的新的、高精度的傳感器網絡,能夠極大地改善汽車雷達網絡系統的性能。
雷達網絡的構成原理
圖1所示的雷達網絡由四個等距離分布在安全杠上的近距離毫米波雷達傳感器(Neardistancesensor,NDS)構成,每個雷達傳感器均采用FMCW體制。該傳感器網絡可在35米的范圍內實現水平方位角為120°的覆蓋面。這種近距離、大覆蓋面的雷達傳感器網絡可以在車速不高,路面狀況比較復雜的情況下(例如市內交通),監控汽車前向較大范圍內的目標。
如果需要遠距離探測,可以在安全杠中間增加一個遠距離雷達傳感器。隨著77GHz汽車雷達傳感器技術的成熟,近/遠距離雷達傳感器都傾向于采用77GHzMMIC(毫米波集成電路)技術實現,采用這種技術容易做出一體化的設計方案,使收發模塊的成本大為降低。
在圖2所示傳感器網絡系統框圖中,基于77GHzMMIC技術的雷達傳感器是構成汽車雷達網絡的前端關鍵硬件,后端的信息處理需要用數字信號處理器等高速運算單元來完成。傳感器、數字信號處理單元以及數據融合決策系統之間采用以太網、高速串行連接的方式傳送數據,以滿足高數據率的傳輸要求。
數據融合系統采用分布式體系結構,即每個近距離傳感器對獲得的回波信號先進行局部處理,然后送入融合中心進行融合以獲得目標的方位、速度信息。控制器是整個雷達網絡系統的最終決策機構,它負責識別目標的距離和速度信息是否對行車安全構成威脅,并通過聲光的形式提示駕駛員或者直接作用于車載控制系統加以調整。
圖2雷達網絡系統結構圖[page]
汽車雷達網絡關鍵技術解決方案
與單個雷達傳感器相比,多傳感器組網的優勢在于測量精度高,誤報率低以及多目標識別的優越性能。測量精度高、誤報率低源于數據融合技術,這就要求每個傳感器在時間、頻率上精確同步;多目標識別取決于系統自身對目標的識別分類能力。因此,在整個雷達網絡包括每個雷達傳感器的設計上都要圍繞著這兩點來進行。
1近距離傳感器設計
近距離雷達傳感器主要擔負著汽車前向35米內的目標探測,是汽車雷達網絡在復雜路況下發揮效能關鍵部分。近距離雷達傳感器主要包括射頻單元、接收機和各個傳感器的之間的精確時間同步控制。在天線的設計上,既要符合所示的波束寬度的要求,同時又不能增大傳感器的體積。因此可以采用印刷體線性陣列天線。
接收機主要由一些低頻元件、抗混疊濾波器和模數轉換裝置構成。這些低頻元件所產生的噪聲可以淹沒微弱的回波信號,是影響探測距離的主要因素之一,因此要盡可能的降低噪聲參數。此外,模數轉換的采樣頻率應該依據近距離傳感器的性能參數來確定。近距離傳感器的原理圖如圖3所示。
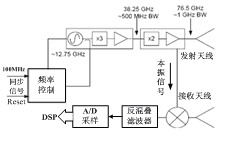
圖3近距離傳感器結構圖
2同步控制
雷達組網后,同樣是通過測量發射信號和回波信號之間的頻率差來確定目標的位置。但不同于單個雷達探測,汽車雷達網絡測量目標的距離和速度是通過對每個傳感器測得的目標信息進行數據融合而得到的。為了測量目標距離以及產生一致的波形,發射機和接收機要有統一的時間標準,這就是時間上的同步。
為了能接收和放大回波信號,雷達傳感器的發射機和接收機必須工作在相同的頻率,當發射機頻率捷變時,接收機本振要作相應的變化,即要實現頻率上的同步。汽車雷達網絡對傳感器之間的時間同步控制誤差要求在10ns內。所以高精度時間頻率同步系統是汽車雷達傳感器組網的關鍵技術。
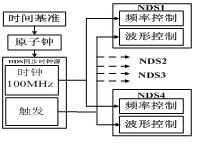
圖4同步系統框圖
圖4給出了基于DDS同步時鐘源的配置,各個收發單元上的DDS同步時鐘源的參考頻率源應采用高穩定度的原子鐘(如銣、銫原子鐘)。各收發單元的原子鐘要定期的用同一時間基準來校準。用作校準的時間基準的精度要更高一些,它們可以是GPS(導航星全球定位系統),羅蘭C或彩色電視發射臺發射的時間基準信號.
3汽車雷達網絡的目標分類算法
目標分類系統的主要任務是針對目標回波信號特征計算給定向量的分類關系,分類器定義了一組不同的目標類別。分類器的工作可以分為研究階段和分類階段,在研究階段分類器對若干特征和經過獨立標記的特征向量進行自動分析;在分類階段,要對每個被檢測到的目標生成特征向量。
與此同時,識別算法采用最大似然方法進行判決,以判別特征向量屬于哪個類,如圖5所示。在汽車應用中,由于分類任務很復雜,通常一個給定的向量需要考慮幾個特征,因而要采用多個分類器,其優點是在研究階段能夠在一次迭代過程中評估某個特征對決策過程的影響,并自動剔除對決策過程影響較小的項目。
基于汽車雷達傳感器的目標分類系統的系統結構和信號處理過程,它可以識別六種不同的雷達目標的類別,包括:步行者、騎自行車的人、車輛、人群、樹木和交通標志等。
[page]
4運動目標位置估算算法
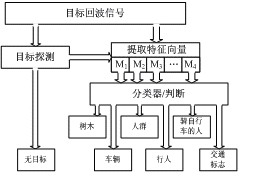
圖5汽車雷達對目標的分類處理過程
FMCW雷達的基本原理是利用發射和回波信號之間的頻率差來確定目標的距離和速度[5]。傳統體制的FMCW采用等周期調頻,在測量單個目標的情況下,簡單可行,表現了良好的實時性和測距測速功能。但是當前方出現多個目標的時候,雷達就會出現判斷上的困難。為了識別多個目標的距離和速度,可以采用變周期的FMCW波形作為發射信號。文獻[6]給出了采用變周期的發射信號測量目標的距離和速度的算法。
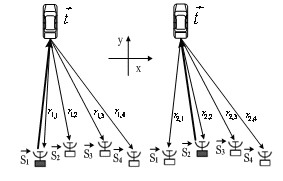
圖6汽車雷達網絡對單目標實現測量
對于本文所討論的雷達網絡系統而言,四個近距離雷達傳感器即是發射機又是接收機。如圖6所示,通過電掃開關的控制,其中的一個NDS擔當發射機,反射信號被四個NDS同時接收。經過信號處理之后,因各個NDS之間位置的不同,可以得到四組關于被測目標的距離和相對速度值(r1,1v1,1)、(r1,2v1,2)、(r1,3v1,3)、(r1,4v1,4)。這種采用單基地發射多基地接收的雷達網絡體制,盡管對傳感器之間的時間同步控制要求很高,但是可以避免鄰近傳感器之間的相互干擾。
汽車雷達網絡測量目標的距離和速度是通過對每個傳感器測得的目標信息進行數據融合而得到的。在一個測量周期中,每個NDS輪流擔當一次發射機。因此有16種距離和相對速度的組合,用向量表示為:

在笛卡爾坐標系中用目標的狀態向量來表述目標的位置矢量和相對速度矢量:
 (2)
(2)每個傳感器在笛卡爾坐標系中的位置用向量表示為:
 (3)
(3)對于每個傳感器而言,如果已知該傳感器和目標在坐標系中的位置,那么距離可以由下面的非線性方程來計算:
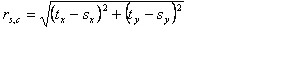 (4)
(4)同理,得到關于目標的相對速度的方程:
 (5)
(5)綜合方程(1)、(2)、(4)、(5),可以得到目標的狀態向量與四個傳感器測得的目標的距離速度的多個非線性方程,用向量函數表示成:
其導數矩陣,也就是雅可比矩陣為:
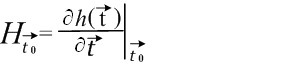 (7)
(7)對方程(7)采用高斯-牛頓迭代算法可以精確計算出目標狀態向量的參數值,繼而可以得到目標的位置和相對速度值。由于上述運算能夠給出運動目標位置的笛卡爾坐標,因此很方便確定位置估算的精度和分辨率[7]。
毫米波汽車雷達網絡的發展現狀
目前,盡管國際上將毫米波汽車雷達網絡的77GHz頻段的研究很充分,但是,具體采用什么頻段,每個國家還有差異,目前關于汽車用近距離雷達傳感器的爭論焦點之一是采用24GHz頻段還是77GHz頻段。爭論的原因是77GHz雷達器件的成本和技術成熟度問題。因此,77GHz雷達傳感器的成本和技術成熟度是汽車雷達網絡是否能夠在市場上取得普及應用的關鍵。
在77GHz雷達傳感器的研發方面,關鍵技術是如何采用GaAs(鎵砷)器件的工藝技術來設計和制造低成本的汽車近/遠距離雷達傳感器,進而降低整個汽車雷達網絡的成本。國外GaAs器件制造業發展的速度很快,已經出現了一些極具性價比的汽車雷達傳感器,一些報道甚至預言在2007年末2008年,汽車雷達網絡的市場將啟動,并有望成為普及型轎車的基本配置。
汽車雷達網絡相對于其它系統,技術門檻要低得多。目前,中國汽車雷達的開發還主要集中在汽車倒車雷達、汽車雷達測速器的層面上,所使用的技術和頻段差別很大,還沒有從器件、頻率分配、汽車雷達網絡結構、近距離和遠距離雷達傳感器、運動目標位置估算算法、運動目標的分類、汽車專用信號處理器等多層次、系統和產業鏈的角度來研究和開發汽車雷達網絡技術,這與國際上日益普及的汽車雷達研究與應用相比,還存在很大的反差。這種狀況與中國作為全球的汽車消費大國的地位是不相適應的。



