
【導讀】多傳感器融合又稱多傳感器信息融合,有時也稱作多傳感器數據融合,于1973年在美國國防部資助開發的聲納信號處理系統中被首次提出,它是對多種信息的獲取、表示及其內在聯系進行綜合處理和優化的技術。
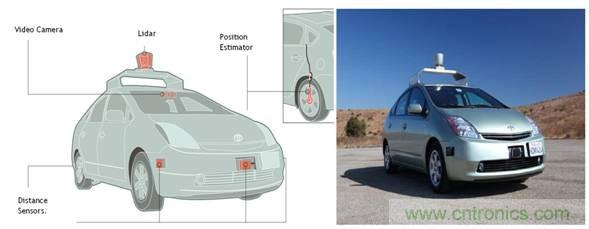
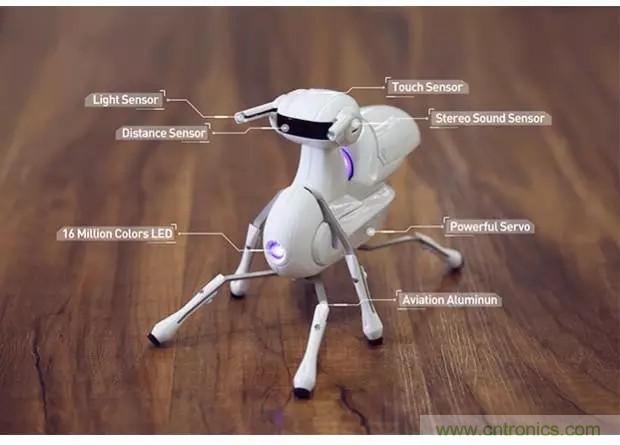
隨著機器人技術的不斷發展,機器人的應用領域和功能有了極大的拓展和提高。智能化已成為機器人技術的發展趨勢,而傳感器技術則是實現機器人智能化的基礎之一。由于單一傳感器獲得的信息非常有限,而且,還要受到自身品質和性能的影響,因此,智能機器人通常配有數量眾多的不同類型的傳感器,以滿足探測和數據采集的需要。若對各傳感器采集的信息進行單獨、孤立地處理,不僅會導致信息處理工作量的增加,而且,割斷了各傳感器信息間的內在聯系,丟失了信息經有機組合后可能蘊含的有關環境特征,造成信息資源的浪費,甚至可能導致決策失誤。為了解決上述問題人們提出了多傳感器融合技術(multi-sensorfusion)。
概述
多傳感器融合又稱多傳感器信息融合(multi-sensor information fusion),有時也稱作多傳感器數據融合(multi-sensor data fusion),于1973年在美國國防部資助開發的聲納信號處理系統中被首次提出,它是對多種信息的獲取、表示及其內在聯系進行綜合處理和優化的技術。它從多信息的視角進行處理及綜合,得到各種信息的內在聯系和規律,從而剔除無用的和錯誤的信息,保留正確的和有用的成分,最終實現信息的優化,也為智能信息處理技術的研究提供了新的觀念。
多傳感器融合的層次結構
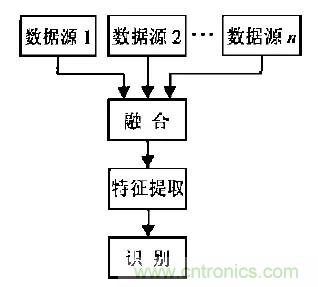
多傳感器融合在結構上按其在融合系統中信息處理的抽象程度,主要劃分為三個層次:數據層融合、特征層融合和決策層融合。
1.數據層融合:也稱像素級融合,首先將傳感器的觀測數據融合,然后從融合的數據中提取特征向量,并進行判斷識別。數據層融合需要傳感器是同質的(傳感器觀測的是同一物理現象),如果多個傳感器是異質的(觀測的不是同一個物理量),那么數據只能在特征層或決策層進行融合。數據層融合不存在數據丟失的問題,得到的結果也是最準確的,但計算量大,且對系統通信帶寬的要求很高。
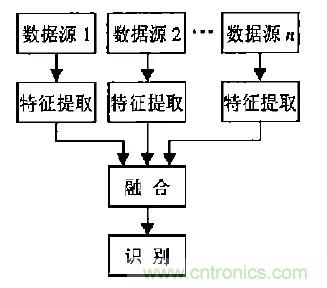
2.特征層融合:特征層融合屬于中間層次,先從每種傳感器提供的觀測數據中提取的有代表性的特征,這些特征融合成單一的特征向量,然后運用模式識別的方法進行處理。這種方法的計算量及對通信帶寬的要求相對降低,但由于部分數據的舍棄使其準確性有所下降。
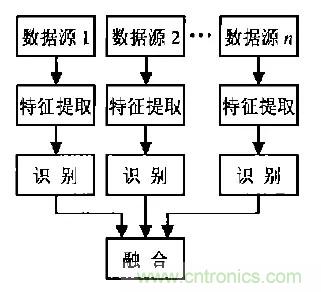
3.決策層融合:決策層融合屬于高層次的融合,由于對傳感器的數據進行了濃縮,這種方法產生的結果相對而言最不準確,但它的計算量及對通信帶寬的要求最低。
對于特定的多傳感器融合系統工程應用,應綜合考慮傳感器的性能、系統的計算能力、通信帶寬、期望的準確率以及資金能力等因素,以確定哪種層次是最優的。另外,在一個系統中,也可能同時在不同的融合層次上進行融合。

多傳感器融合的算法
融合算法是融合處理的基礎。它是將多元輸入數據根據信息融合的功能要求,在不同融合層次上采用不同的數學方法,對數據進行綜合處理,最終實現融合。目前已有大量的融合算法,它們都有各自的優缺點。這些融合算法總體上法可以分為三大類型:嵌入約束法、證據組合法、人工神經網絡法。
1.嵌入約束法
由多種傳感器所獲得的客觀環境的多組數據就是客觀環境按照某種映射關系形成的像,傳感器信息融合就是通過像求解原像,即對客觀環境加以了解。用數學語言描述就是,即使所有傳感器的全部信息,也只能描述環境的某些方面的特征,而具有這些特征的環境卻有很多,要使一組數據對應惟一的環境(即上述映射為一一映射),就必須對映射的原像和映射本身加約束條件,使問題能有惟一的解。嵌入約束法有兩種基本的方法:貝葉斯估計和卡爾曼濾波。
2.證據組合法
證據組合法認為完成某項智能任務是依據有關環境某方面的信息做出幾種可能的決策,而多傳感器數據信息在一定程度上反映環境這方面的情況。因此,分析每一數據作為支持某種決策證據的支持程度,并將不同傳感器數據的支持程度進行組合,即證據組合,分析得出現有組合證據支持程度最大的決策作為信息融合的結果。
證據組合法是為完成某一任務的需要而處理多種傳感器的數據信息。它先對單個傳感器數據信息每種可能決策的支持程度給出度量(即數據信息作為證據對決策的支持程度),再尋找一種證據組合方法或規則,使在已知兩個不同傳感器數據(即證據)對決策的分別支持程度時,通過反復運用組合規則,最終得出全體數據信息的聯合體對某決策總的支持程度,得到最大證據支持決策,即傳感器信息融合的結果。
常用的證據組合方法有:概率統計方法、D-S(Dempster-Shafer)證據推理法。
3.人工神經網絡法
人工神經網絡通過模仿人腦的結構和工作原理,設計和建立相應的機器和模型并完成一定的智能任務。神經網絡根據當前系統所接收到的樣本的相似性,確定分類標準。這種確定方法主要表現在網絡權值分布上,同時可采用神經網絡特定的學習算法來獲取知識,得到不確定性推理機制。采用神經網絡法的多傳感器信息融合,分三個主要步驟:
(1).根據智能系統要求及傳感器信息融合的形式,選擇其拓撲結構;
(2).各傳感器的輸入信息綜合處理為一總體輸入函數,并將此函數映射定義為相關單元的映射函數,通過神經網絡與環境的交互作用把環境的統計規律反映網絡本身的結構;
(3).對傳感器輸出信息進行學習、理解,確定權值的分配,進而對輸入模式作出解釋,將輸入數據向量轉換成高級邏輯(符號)概念。

前景展望
在多傳感器融合技術中,融合結構、融合算法都占有重要地位。隨著多傳感器融合研究與應用的深入,未來的多傳感器融合將會是一個更加復雜的信息處理過程,不僅包括許多具體的算法,而且結構也比較復雜。如何根據實際應用將算法與結構有機地結合在一起,為整個融合系統提供更加有效的融合策略,這是未來多傳感器融合研究所要解決的主要問題。目前已有大量的融合算法,它們都存在各自的優缺點,需要通過合理的融合結構將這些算法組合在一起,使其揚長避短,構成更加有效的融合方法。另外,多傳感器融合還將面臨一個難題,那就是動態與未知環境下的融合問題,這無疑會對融合方法提出更高的要求。這不僅需要性能更好的融合算法,而且需要更加靈活的融合結構,提高融合系統的自適應性和魯棒性。


