

隨著MEMS 技術的發展,基于MEMS 技術的慣性傳感器得到迅速發展,其具有價格低、體積小、功耗低、精度高的特點,利用MEMS 加速度傳感器設計的電子計步器,通過測量人體行走時的加速度信息,經過軟件算法計算步伐,可以克服機械式計步器準確度和靈敏度低的缺點,可準確地檢測步伐,同時還可以輸出運動狀態的實時數據,對運動數據進行采集和分析。
1 人體運動模型
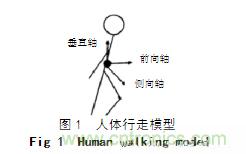
通過步態加速度信號提取人步行的特征參數是一種簡便、可行的步態分析方法。行走運動包括3 個分量,分別是前向、側向以及垂直向,如圖1 所示。LIS3DH 是一種三軸( X,Y,Z 軸) 的數字輸出加速度器,可以與運動的3 個方向相對應。
行走運動分量在一個步伐,即一個邁步周期中加速度變化規律如圖2 所示,腳蹬地離開地面是一步的開始,此時,由于地面的反作用力垂直加速度開始增大,身體重心上移,當腳達到最高位置時,垂直加速度達到最大,然后腳向下運動,垂直加速度開始減小,直至腳著地,加速度減至最小值,接著下一次邁步發生。前向加速度由腳與地面的摩擦力產生的,因此,雙腳觸地時增大,在一腳離地時減小。
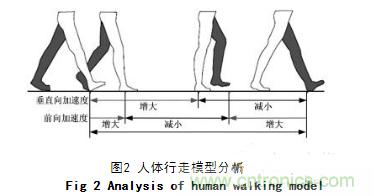
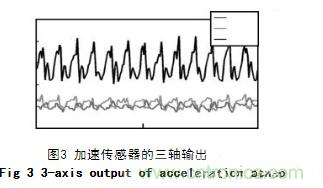
圖3 為一次步行實驗中,LIS3DH 檢測到的X,Y,Z 軸的加速度變化情況。可以看出: Z 軸加速度數據( 人行走的豎直方向) 具有明顯的周期性,加速度值最小處對應的是腳離開地面( 一步的開始或結束) ,最大值對應腳抬到最高點。
在具體使用時,手持設備的放置情況是隨意的,加速度計的3 個軸有可能不與人體模型定義的3 個軸向重合,文中提到利用加速度的峰—峰值來判斷加速輸出最大的一軸作為有效軸。但這種方法易丟失計數點,使計數不夠準確。為了充分利用加速度傳感器輸出的三軸信號,本文將加速度信號進行取模求和后用來計步。
2 算法設計
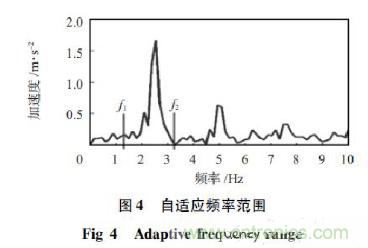
由圖3 可知,Z 向加速度計原始輸出雖然具有一定的周期性,但由于噪聲導致變化復雜,不易于直接進行計步,需對信號進行濾波,盡可能消除噪聲影響。通常情況下,人的步頻最快不會超過5 steps /s,最慢為0.5 steps /s。因此,可以認為原始信號中頻率為0. 5 ~ 5 Hz 的信號為有用信號,其他信號均為噪聲。可以用( FFT) 濾波實現保留部分頻率信息的要求,提取有用信息。但正常行走的任一段時間內,步頻的變化都會集中在峰值頻率附近的一個小范圍內,而不是0. 5~ 5 Hz 這么大,所以,本文經過分析大量實驗數據的頻譜,建立了一個比0. 5 ~ 5 Hz 小的自適應頻率范圍( f1,f2) ( 如圖4 所示) ,通過FFT 保留該頻率范圍內的有用信號,去除范圍外的無用信息。
經實驗驗證利用該動態頻率范圍能更好地去除噪聲對步數判斷的影響,如圖5( a) 和( b) 所示。圖5 ( a) 是利用FFT 濾波和動態頻率范圍對原始加速度信號濾波后的加速度變化曲線,圖5( b) 是直接利用FFT 濾波與0. 5 ~ 5 Hz 的頻率范圍對原始加速度濾波后的加速度變化曲線。
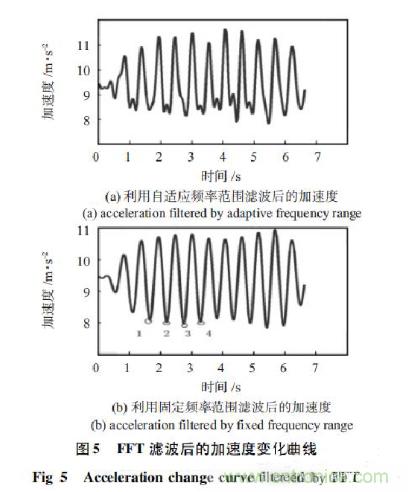
由圖5 可以看出: 圖5( a) 中部分噪聲還不能消除,存在多峰值的情況,而計步圖5( b) 中加速度曲線較平滑,加速度的周期性化趨勢已非常明顯,變換規律也比較簡單,可利用軟件算法實現計步,停止時加速度雖仍有一定的輸出,但其峰值明顯小于行走時加速度峰值,因此,可通過限定加速度的大小去除影響。對行走時加速度變化曲線進行分析,可以看出在一定時間間隔內會有一個加速度波谷( 圖中的1 ~ 4 點) 和加速度最小的時刻( 對應腳落下或者抬起) ,當腳抬起來的時候( “起點”) ,身體重心上移,加速度也變大,加速度曲線中波峰對應的是人腳抬至最高處,再到下一個波谷,這就是一個完整的步伐。此外,計步器因步行之外的原因而迅速或緩慢振動時,也會被計數器誤認為是步伐。在步行時,速度快時一個步伐所占的時間間隔長,走的慢時時間間隔短,但都應在動態頻率范圍確定時間窗口內,所以,利用這個時間窗口就可以有效地減小無效振動對步頻判斷造成的影響。基于以上分析,可以確定邁步周期中加速度變化情況應具備以下特點
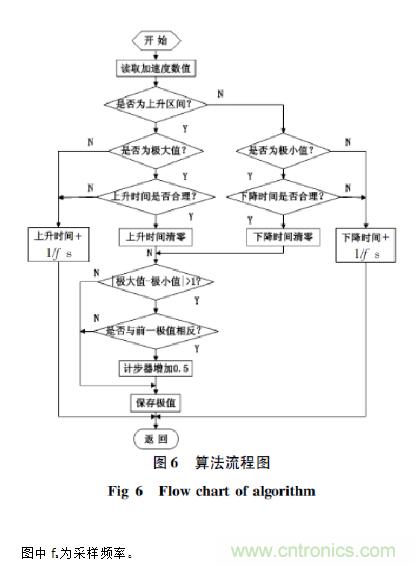
(1)一個邁步周期中僅出現一次加速度極大值、極小值,有一個上升區間和下降區間; (2)一個單調區間對應邁步周期的50 %,因而,時間間隔應該在1 /2 個時間窗口之間; (3)行走時,加速度極大值與極小值是交替出現的,且其差的絕對值不小于預設的閾值1。根據以上三點對加速度變化區間進行約束,認為同時滿足以上三點變化區間對應半個步伐。具體流程圖如圖6所示。
3 硬件實現
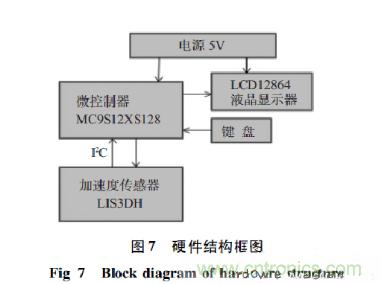
圖7 所示為系統的硬件結構框圖。本文中選用的加速度傳感器LIS3DH 輸出數字信號,所以,采樣得到的數據不必再專門選用芯片來做模數轉換。傳感器和控制模塊接口為SPI 總線或者I2C 總線。加速度傳感器LIS3DH,有X,Y,Z 三個自由度的加速度數字輸出,可以全方位感知人體行走運動信息; 控制模塊由LCD12864[5]顯示模塊、微控制器MC9S12XS128[6]、鍵盤和電源組成,用來讀取加速度信息,并將算法處理得到計步數值顯示在液晶顯示屏上。
為了檢驗計步器的精度和適應能力,在加速度計Z 軸朝上的情況下從較慢步頻、正常步頻、較快步頻3 個方面進行測試,分別進行2 組實驗,每次實驗行走100 步。計步器測試結果見表1。

4 結論
加速度傳感器LIS3DH 采用3mm &TImes; 3mm &TImes; 1mm 的小尺寸封裝,大大減小了整個系統的尺寸,可以很方便地移植到如手機、遙控器以及游戲機這些有運動感應功能,而空間和功耗有嚴格限制的設計中; 由于具有三軸數字輸出功能,用戶可以將計步器戴在身上任何部位。該計步系統可以較好地適應不同步頻情況,計步精度高,穩定性好。
推薦閱讀:
電源線的噪聲共模干擾和差模干擾優化設計
可控的開關電源軟啟動電路應用設計
淺談集成穩壓器調整率參數的測量原理和方法
《2017年協作機器人行業發展藍皮書》重磅全球首發




