
- 無傳感器無刷直流電機的控制方式
- 控制系統軟、硬件設計
- PWM波輸出控制
- 反電動勢換相信號檢測
在一些應用場合要求使用的電機體積小、效率高、轉速高,微型永磁無刷直流電機能夠較好地滿足要求。因為電機體積較小,安裝位置傳感器困難,所以微型無刷直流電機的無位置傳感器控制就顯得尤為必要。
無刷直流電機的無位置傳感器控制的難點在于轉子位置信號的檢測,目前國內外研究人員提出了諸多方法,其中反電動勢法最為簡單、可靠,應用范圍最廣泛。普遍采用的控制方案為基于DSP的控制和基于專用集成電路的控制等,但是其價格高、體積大,不利于用在微型電機控制器中。本文介紹基于C8051F330單片機、檢測反電動勢法的無位置傳感器無刷直流電機的控制器,系統結構簡單,體積超小型,價格低廉,運行性能良好。
無傳感器無刷直流電機的控制方式
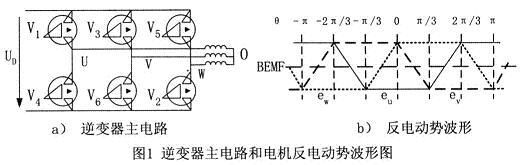
實現無刷直流電機電子換相及PWM控制的逆變器主電路如圖1a所示。采用兩兩通電方式,即每一個瞬間有兩個功率管導通,每隔60°電角度換相1次,每一功率管導通120°電角度。功率管的導通順序是:V6V1→V1V2→V2V3→V3V4→V4V5→V5V6。
在方波無刷直流電機中,定子繞組的反電動勢波形(即氣隙磁通波形)為正負對稱的梯形波,如圖1b所示。從圖中可以看出當檢測到不通電相繞組的反電動勢為零時,以此作為起點滯后30°電角度,即為最佳換相時刻。因此只要測出各相反電動勢的過零點就可獲得三相電機所需的6個關鍵位置信號,進而實現定子繞組的正確換流。電動機繞組中性點0一般未引出,直接測定繞組反電動勢相值比較困難,而便于測量的是三相定子繞組對地的端電壓。端電壓過中點(直流電源電壓的一半)與反電動勢過零點在時間上是重合的,所以尋找反電動勢的過零點后30°電角度即相當于尋找端電壓的過中點后30°電角度。
控制系統設計
2.1硬件電路設計
系統的硬件電路圖如圖2所示,以C8051F330單片機、逆變橋電路、端電壓檢測電路、穩壓電路等組成。本電路設計得非常簡潔,各種元器件都使用小型的貼片封裝,非常適合對成本和體積都比較敏感的微型電機控制器。
逆變橋電路中上橋臂為P型MOSFET器件FDS6679,下橋臂為N型MOSFET器件M4410B,均為低電壓驅動器件。FDS6679通過一個NPN型三極管驅動,而M4410B由C8051F330的P1口直接驅動(P1口設置成推挽輸出)。PWM控制模式定為:PWM僅應用于半橋的下端MOSFET,同時換流的上端(對角線)MOSFET僅起換相通斷控制。
電源電壓和電流的檢測:當UV相通電,在PWM開通期間檢測U相的端電壓Uu,由于MOSFET的通態電壓很小(小于0.1V),端電壓uu可以近似看作是電源電壓UD;在下橋臂源極和電源地之間串接采樣電阻,通過P0.4口檢測電阻電壓得到電流值,輸入信號先經過內部可編程增益放大器放大,再作A/D轉換。
[page]
2.2軟件設計
軟件主要有初始化程序、電機起動程序、端電壓檢測及換相程序、電壓和電流保護程序、運行控制程序等組成。共有四個中斷:PWM中斷、ADC中斷、T1中斷、T2中斷。其中T2中斷實現電機起動程序,PWM中斷在PWM開通期間啟動ADC中斷,在ADC中斷中進行端電壓檢測,當檢測到反電動勢過零點時啟動T1中斷完成換相。主程序如圖3所示。
[page]
2.2.1G8051F330的初始化
由于C8051F330單片機與8051單片機在內部資源上有差異,所以它們的初始化有所不同。主要有兩點不同:對外引腳的交叉開關的配置;對系統時鐘源的配置。考慮到用戶自己寫初始化程序很繁瑣,SiliconLabs公司推出了C8051F單片機初始化代碼生成程序軟件Config2Version1.30。用戶只要在圖形化的界面上用鼠標點擊選擇,就可以方便地生成C8051F330的初始化程序。大大加快了用戶的開發速度。
2.2.2PWM波輸出控制
C8051F330的可編程計數器陣列(PCA)由一個專用的16位計數器/定時器和3個16位捕捉/比較模塊組成,恰好可以實現3路8位PWM或16位PWM功能。PCA的16位計數器/定時器的高字節PCAOH和低字節PCAOL決定PWM波的頻率,通過改變捕捉/比較模塊的高字節PCAOCPHn和低字節PCAOCPLn就可以改變PWM波的占空比。
2.2.3端電壓檢測及換相
反電動勢換相信號檢測:在PWM開通期間啟動ADC,檢測處于不通電相繞組的端電壓,其值等于電源電壓的一半時為反電動勢過零點信號。要考慮:a.ADC檢測時刻應與PWM同步,并選擇PWM開通時間的中點為佳,以避開開關狀態的瞬態電壓噪聲。b.在軟件中應舍棄換相后的最初幾個反電動勢采樣點,因為換相后繞組電流不會立即為零,要經過一個續流過程才下降為零。程序如圖4所示。使用定時器0記錄連續監測到兩個端電壓過零點的時間,除以2即為30°電角度的時間,把此時間裝載到定時器1中,定時器1經過30°電角度時間觸發中斷,調用換相子程序進行電子換相。
實驗結果及結論
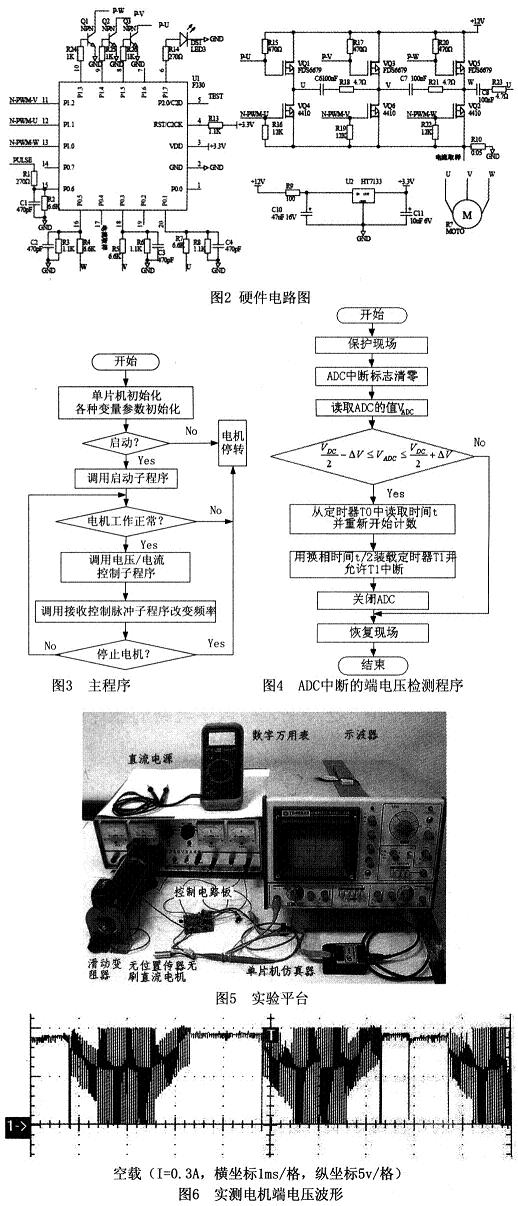
實驗樣機采用長沙方圓模型廠生產的無傳感器無刷直流電機,型號為1208436,額定參數為,轉速:4100r/V,2對極,最大電流:4A,內阻:0.59Ω,空載電流:0.3A。實驗平臺如圖5所示。
當電源電壓為10V、PWM占空比為20%、空載時,端電壓波形圖如圖6所示。從圖中看出,換相時間為0.6ms左右,端電壓波形是較好的梯形波。根據電機額定參數計算換相時間為0.609ms(60°電角度),可見換相時間比較準確。通過實驗證明,采用上述控制技術,電機系統起動平穩,無振動和失步現象,同時系統具有結構簡單、小型化、低成本、運行可靠、調速性能良好的優點。


