

【導讀】多光譜遙感是指用具有兩個以上波譜通道的傳感器對地物進行同步成像的一種遙感技術,它將目標物體反射輻射的電磁波信息分成若干波譜段進行接收和記錄。實現多光譜遙感的傳感器為多光譜相機,一次拍攝可形成多幅不同光譜的影像。
(1.中國科學院遙感與數字地球研究所遙感科學國家重點實驗室, 北京 100101;2.中國科學院遙感與數字地球研究所數字地球重點實驗室, 北京 100094;3.中國科學院地理科學與資源研究所資源與環境信息系統國家重點實驗室, 北京 100101;4.北京農業智能裝備技術研究中心, 北京 100097)
摘要:隨著光譜傳感技術和圖像處理與分析軟件的日益成熟,無人機多光譜軟硬件一體化程度和觀測精度及易用性得到極大的發展。無人機多光譜遙感已在農業、林業、資源、生態、環境保護等領域應用日益廣泛。本文概述了無人機飛行平臺、多光譜傳感器等硬件技術的發展,和無人機遙感影像的幾何校正、輻射校正圖像處理技術及數據處理流程,并對無人機多光譜遙感在植被長勢監測、存在問題、精細分類與地物識別、病蟲害監測、生物量和產量估算等方面的應用潛力和發展方向進行了系統分析和總結,以期為開展相關領域研究提供參考。建議各行業部門的專業人員與遙感、計算機科學等領域的專家密切合作,制訂無人機多光譜遙感技術的相關標準和規范,共同推進并普及無人機多光譜遙感技術。
0 引言
多光譜遙感是指用具有兩個以上波譜通道的傳感器對地物進行同步成像的一種遙感技術,它將目標物體反射輻射的電磁波信息分成若干波譜段進行接收和記錄[1-2]。實現多光譜遙感的傳感器為多光譜相機,一次拍攝可形成多幅不同光譜的影像[2]。
輕小型無人機遙感系統作為低空遙感系統的重要組成部分,具有機動靈活、操作簡便、按需獲取高時空分辨率數據且應用成本低的優勢,有效彌補了衛星及大型航空遙感系統在地表分辨率低、重訪周期長、受水汽影響大等不足,為中小尺度的遙感應用研究提供了新的工具[3-4]。輕小型無人機遙感系統是在輕小型無人機平臺上配備相應的傳感器(可見光相機、多光譜相機、高光譜儀、紅外傳感器、激光雷達等),利用通信技術和定位定姿技術快速無損獲取關于目標地物的高分辨率影像及數據,經過處理的數據作為參數輸入遙感反演模型,相關產出可用于參數提取或者行業具體應用。
目前,搭載在輕小型無人機平臺上的多光譜遙感應用日益廣泛,為系統了解該技術及其應用領域,本文對飛行平臺、多光譜相機等硬件技術加以概述,并從幾何和輻射校正等方面對多光譜圖像數據處理技術及數據處理流程進行梳理和總結,同時對小型無人機多光譜遙感技術未來應用領域和發展方向進行系統分析和展望。
1 輕小型無人機多光譜遙感系統 1.1 無人機遙感系統
完整的輕小型無人機遙感系統如圖1所示,主要包括:無人機平臺、微小型傳感器、地面站系統和數據處理系統[5-9]。其中,無人機平臺即無人機本身,是搭載飛控、導航定位系統及傳感器等設備的載體。微小型傳感器是指安裝于無人機平臺上的獲取遙感數據的傳感器及其控制裝置,其中的控制裝置通常與導航、飛控系統進行一體化設計,具有觸發控制傳感器、記錄拍照時刻的位置及姿態信息的功能。地面站系統主要用于飛行參數設置、路徑規劃和無人機實時操控等。數據處理系統主要完成遙感影像的數據存儲、處理及產品展示等。地面站系統與飛控之間通過數據傳輸系統進行通信,主要實現飛行數據、控制指令、圖像數據的實時交互傳輸等。
1.2 無人機平臺
輕小型無人機飛行平臺種類繁多,有無人直升機、固定翼無人機、多旋翼無人機、混合翼無人機等多種機型[10-11]。飛艇與飛翼無人機由于體積和重量較大[7],不在本文的討論之列。直升機起降靈活,可自由懸停,載重也較大,但操作復雜,成本較高[12-13]。固定翼無人機飛行速度快,續航時間長,覆蓋面積廣,但飛行速度難以根據需求調節,且載荷較小[14]。多旋翼無人機飛行速度可控,飛行高度可調且可以低空飛行,起降靈活,成本較低,但是其飛行時間較短,載荷能力也較小[15]。一般來說,小型無人機的有效載荷為10 kg以下,最大飛行高度3 000 m以內,最大飛行速度不超過33 m/s[6]。從組成部分來說,無人機平臺主要包括無人機體、飛行控制系統、遙控器、能量系統以及地面站[6,10]。其中,地面站主要完成航線規劃和飛行參數設置,其自動化及智能化程度的提高顯著降低了無人機飛行平臺的操作難度,當對同一個試驗區進行多次重復觀測時,利用地面站航線信息可方便實現飛行任務的重復執行。飛行控制系統主要完成飛機的操控,如起飛、降落、空中飛行姿態控制等,是無人機系統的關鍵技術之一??傮w而言,小型固定翼無人機和電動多旋翼是目前最常用的飛行平臺,因為這些飛機在價格、載荷能力和飛行時間等方面進行了可行的折衷處理[2,16]。
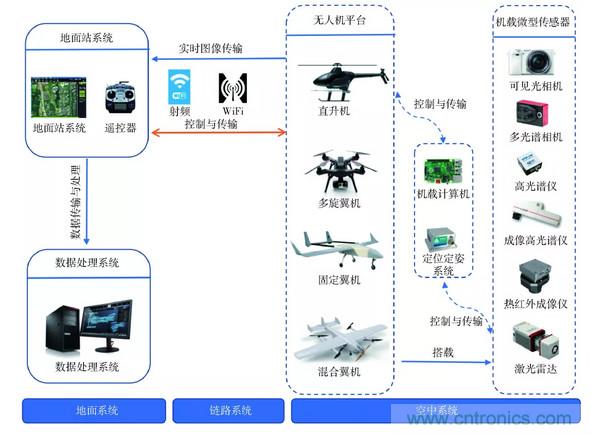
圖1 無人機遙感系統組成圖
1.3 小微型多光譜傳感器
受限于小型無人機的有效負荷能力,一般要求多光譜傳感器必須滿足質量輕、體積小、精度高、功耗低的要求。本文的小/微型多光譜傳感器僅包括質量在4 kg以內的商業化產品[17]。按照探測波長的不同,這些傳感器主要分為可見光波段(400~760 nm)數碼相機(Digital camera)、可見近紅外波段(400~1 100 nm)多光譜相機(Spectral camera)、熱紅外波段(3.6~13.5 μm)相機(Thermal camera)等。其中,代表性的小/微型多光譜傳感器主要有ADC lite(Tetracam Inc., Chatsworth, CA, USA)、RedEdge(Micasensen Inc., Seattle, WA, USA)、Parrot Sequoia(Parrot Inc., Paris, France)、FLIR Tau 2 (FLIR Systems Inc., USA)等,其性能參數對比如表1所示。
表1小微型多光譜傳感器產品比較分析
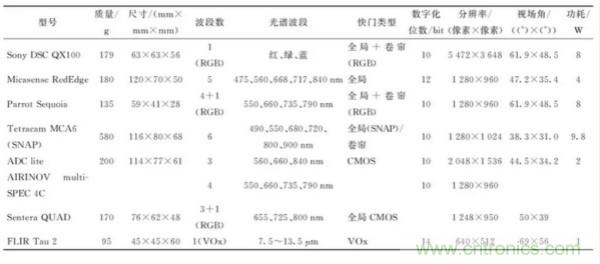
型號質量/g尺寸/(mm×mm×mm)波段數光譜波段快門類型數字化位數/bit分辨率/(像素×像素)視場角/((°)×(°))功耗/WSonyDSCQX10017963×63×561(RGB)紅、綠、藍全局+卷簾(RGB)105472×364861.9×48.58MicasenseRedEdge180120×70×505475、560、668、717、840nm全局121280×96047.2×35.44ParrotSequoia13559×41×284+1(RGB)550、660、735、790nm全局+卷簾(RGB)101280×96061.9×48.58TetracamMCA6(SNAP)580116×80×686490、550、680、720、800、900nm全局(SNAP)/卷簾101280×102438.3×31.09.8ADClite200114×77×613560、660、840nmCMOS102048×153644.5×34.22AIRINOVmulti-SPEC4C4550、660、735、790nm101280×960SenteraQUAD17076×62×483+1(RGB)655、725、800nm全局CMOS1248×95050×39FLIRTau29545×45×601(VOx)7.5~13.5μmVOx14640×51269×561
1.3.1小型多光譜相機原理與分類
可見光波段數碼相機是無人機遙感系統中應用最為廣泛的一類傳感器,可快速獲取可見光波段灰度或者彩色圖像。可見光波段數碼相機最大的優勢是成本低、像素數高、操作簡單。無人機遙感獲取可見光影像對環境要求相對較低,晴天和陰天條件下均可進行數據采集,但對曝光設定有一定的要求,云的遮擋和環境光線的變化易導致圖像曝光不足或過度。
可見近紅外波段多光譜相機通過分光獲取不同波段的單色圖像,根據分光方式的不同可分為單鏡頭加分光系統[18]和多鏡頭分光[19-20]等類型。其中,多鏡頭分光是通過在多個成像焦面傳感器前端分別設置不同譜段的窄帶干涉濾光片的方式實現[21]。 按感光元件的不同,多光譜傳感器分為CCD(Charge coupled device)相機和CMOS(Complementary metal oxide semiconductor)相機兩種。CCD在影像品質等方面均優于CMOS,而CMOS則具有低成本、低功耗以及高整合度的特點。對應于采用CCD傳感器的多光譜相機多采用全局快門(如RedEdge、Sequoia等相機),所有像素點同時收集光線,同時曝光,有利于在飛行狀態下獲取無畸變的圖像。而對應于CMOS傳感器的多光譜相機多采用卷簾快門(如MCA6)。目前,主流的小型多光譜相機一般是采用獨立的鏡頭與傳感器,傳感器前端設置不同波段的濾光片(如Tetracam MCA 6、Micasense RedEdge、Parrot Sequoia等相機)實現多波段影像的同時獲取。
在實際應用中,市場上消費級數碼相機的面陣探測器前面都包含一個阻止紫外線和紅外線帶通濾波器,用于僅透過入射輻射中的可見光部分,但實際上探測器的響應波長可以達到近紅外波段的900~1 100 nm,這就為將數碼相機改造為多光譜相機提供了可能[22]。如LELONG等[23]將數碼相機(Canon EOS 350D和SONY DSC-F828)的可見光帶通濾光片去除,改造成為一個包含紅(R)、綠(G)、藍(B)、近紅外(NIR)4個波段多光譜相機(光譜范圍覆蓋570~850 nm)。此外,應用中還可以通過將數碼相機與獨立的紅外相機(如Canon S110 NIR)[24-25]組合起來實現無人機多光譜觀測。
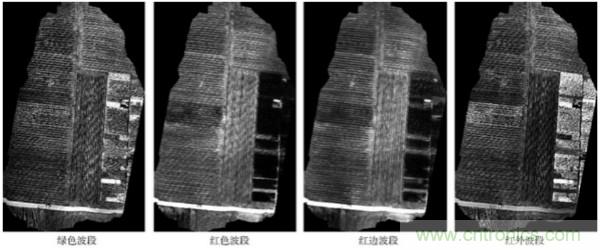
圖2 多光譜相機拍攝的多光譜圖像拼接圖(2017年,河南省安陽市)
熱紅外相機[26]通過對熱紅外波段(2~1 000 μm)敏感的探測器對目標成像,能反映出目標表面的溫度信息。由于氣孔導度、光合特性和蒸騰速率與植被冠層溫度密切相關,高分辨率的紅外熱成像技術可以用來確定植被在非生物脅迫狀態下的響應,如水分脅迫[27-28]等。此外,利用哺乳動物溫度恒定的特點,熱紅外相機還可用于野生動物物種的精確識別[29]。受限于熱紅外探測器的像元數目(如FLIR Tau2的像素數為640×512),目前熱紅外相機的分辨率較低,當對非均質目標進行觀測時,混合像元(例如一個像元包含同時來自土壤和植被的信號)的存在會顯著影響觀測的精度[30]。利用更高分辨率的RGB圖像與熱紅外數據融合可以降低混合像元的影響[6]。此外,無人機只能搭載小型熱成像攝像機,這些設備通常使用非制冷的微測輻射熱計傳感器(如氧化釩VOx),傳感器測量值溫漂較大[28],另外,還需要消除背景溫度(包括太陽輻射、環境溫度和風速等)的影響[31],因此,必須選擇合適的方法對熱紅外數據進行大氣糾正并進一步開展現場校準[28,32]。
1.3.2多光譜傳感器獲取的信息
本科院校圖書館、公共圖書館與科研院所圖書館對新進人才需求較大,但對圖情專業畢業生而言,不同類型圖書館的要求不盡相同。具體來說,公共圖書館對圖情專業畢業生專業技能要求偏向操作性;本科院校圖書館專業要求較高,并希望具有其他專業背景;科研院所圖書館對圖情專業畢業生要求最高,要求其能獨立開展參考咨詢業務,并具備一定的科研能力。
多光譜相機輸出的影像數據格式類型包括JPEG、TIFF或RAW等,圖像的數字化位數一般為8~12位。由于小型多光譜相機的像元數較小,并且飛行高度較低,因此單幅影像的成像面積較小,將飛行中獲取的多幅影像進行拼接、校準和計算可以獲取大幅拼接影像及一系列的光譜指數圖像數據。圖2展示了Sequoia相機拍攝的多光譜圖像的拼接圖,圖中包括4個不同波段的拼接圖像。根據多光譜相機具體的波段設置,可獲取的植被指數主要包括:比值植被指數(Ratio vegetation index,RVI)、歸一化植被指數(Normalized difference vegetation index,NDVI)、土壤調節植被指數(Optimized soil adjusted vegetation index,OSAVI)、氮素反射指數 (Nitrogen reflectance index,NRI)、增強植被指數(Enhanced vegetation index,EVI)、轉換型葉綠素吸收反射率指數(Transformed chlorophyll absorption ratio index,TCARI)和光化學植被指數(Photochemical reflectance index,PRI)等。另外,利用無人機多光譜影像數據還可以生成數字表面模型DSM(Digital surface model)信息。綜上所述,無人機多光譜系統可以獲取關于地物的多光譜信息、紋理信息和結構信息[33]。
1.4 無人機飛行參數設置
常規無人機的設置參數包括飛行高度、飛行速度、飛行軌跡規劃等。這些參數往往相互影響,需要相互調整配合才能保證無人機遙感系統實現最佳的數據獲取能力。對于多光譜無人機遙感系統,飛行的高度決定了地表分辨率,飛行的航向重疊率和航間重疊率決定了拼接的質量。傳統航空攝影技術規范中航向重疊度(53%~65%)和旁向重疊度(15%~40%)要求較高[34],獲取的數據量較大,因此數據采集處理的時效性較低,在應急救援和災害損失調查等時效性要求較高的特殊領域,或者需要大面積采集圖像的應用場景下,低重疊度(15%~30%)的數據采集方式和處理方法越來越受到重視[35],韓峰等[36]通過對無人機搭載的Micro MCA12 Snap多光譜數據進行處理分析,在算法和軟件的支持下,航向30%左右的低重疊度無人機圖像拼接完全可以得到適合所有類型應急的大面積圖像數據和DSM數據,特別是在現場應急響應的使用中,采用低重疊度的拍攝方法和拼接方法可極大地提高應急響應時間。在實際應用中,為了保證拼接的質量,對于森林或者稠密的作物,通常建議的多光譜相機的航向重疊率為75%~85%,旁向重疊率為60%~70%。為滿足影像重疊度要求,實際作業中需要根據作業區域、飛行高度、圖像傳感器參數、地面分辨率等參數進行航線規劃,并且將相機的拍照幀頻與無人機的飛行速度進行合理匹配,其相關關系為
f/H=S/G (1)
式中 f——相機焦距 H——飛行高度
S——相機傳感器電荷耦合元件單個像元大小
G——影像的地面分辨率
2 無人機多光譜信息獲取與數據處理
多光譜飛行數據為各個波段獨立的覆蓋范圍較小的照片[37],經過攝影測量處理和輻射校準處理,可以獲取大幅面的具有確定反射信息的影像。數據處理流程如圖3所示,主要包括多光譜數據處理、圖像拼接、幾何校正、輻射校正和遙感產品生成等。
2.1 攝影測量處理
攝影測量處理是將大量的單波段的無人機多光譜圖像自動拼接為無縫多光譜正射影像并且進行幾何校正和地理配準。
大量自動化攝影測量工具軟件如Pix4Dmapper(Pix4D SA, Lausanne, Switzerland)[38]、PhotoScan(Agisoft LLC, St.Petersbueg, Russia)[39]、ERDAS LPS(Leica Photogrammetry Suite, Leica, German)[28,40]、INPHO(Trimble,USA)等的出現為無人機多光譜數據的快速處理及廣泛應用提供了便利。需要注意的是多光譜圖像一般具有多個波段,用作特征匹配的波段選擇對于匹配的結果影響顯著[41],因此需要根據地物的反射特征、環境條件等進行特殊選擇[37]。無人機多光譜系統獲取的多光譜圖片一般是通過飛機的機載GPS進行地理標記,在處理過程中,圖像集在整個研究區域設置多個地理參考地面控制點(GCP),這些控制點可使用測量級GPS以厘米的精度進行地理定位,根據區域覆蓋,可以靈活調整GCP數量[38]。圖像數據經過初始對齊操作后,再利用控制點作為標記來優化稀疏點云并且將圖像重新定向為大地坐標系[42]。高林等[43]對拼接后多光譜圖像采用ENVI 軟件的Image to Image模塊,以高精度數碼正射影像為參考圖像,在圖像不同位置均勻選取30個參考點進行幾何校正,經檢驗影像幾何糾正誤差小于0.5個像元。幾何校正還可以使用ArcGIS(ESRI, Redlands, CA, USA)實現,選擇預設控制點或者地面特征點作為地理參考點[44]。楊貴軍等[45]開展了基于無人機低精度 POS 數據的無人機數據幾何校正研究,面向多遙感載荷獲取的無人機遙感數據,實現無地面控制點的影像幾何校正。
以PhotoScan軟件處理RedEdge多光譜相機數據生成正射影像為例,其數據處理的流程如圖4所示。①圖像對齊,該軟件在圖像中查找同名點并進行匹配,還可以確定每幅圖像的相機位置并優化相機校準參數,這個過程輸出的是稀疏點云。②使用地面控制點的坐標對圖像進行地理配準。為了優化攝像機,可以使用漸進式選擇工具根據重建不確定性、投影精度和重投影誤差等參數進行稀疏點云過濾,之后圖像被重新對齊,大大提高準配準的準確性。③基于估計的相機位置和圖像本身,由軟件構建密集點云。④建立數字表面模型DSM,并在此基礎上生成正射影像。
1981年,我出生在爺爺曾經住過的茅草屋里,那一年是他去世的第三年。聽父親說,爺爺一輩子從不計較個人得失,臨終前也不占集體的一點便宜。因此,這間茅草屋承載著爺爺的光榮傳統和我對他唯一的記憶,即便四處漏風、漏雨,全家人依然沒有離開它的打算。
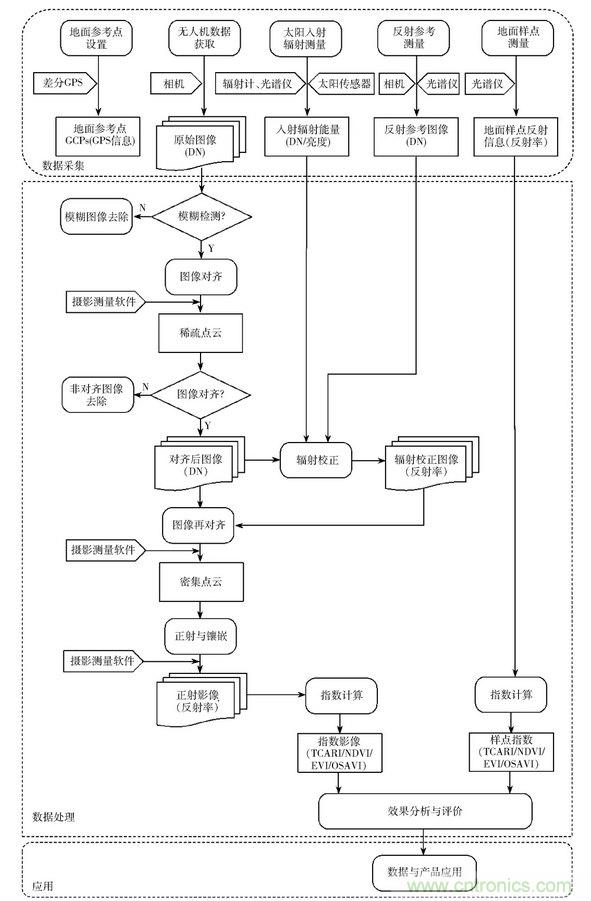
圖3 無人機多光譜數據處理流程
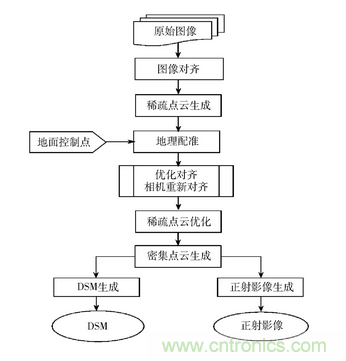
圖4 攝影測量處理流程圖
需要注意的是對多光譜進行攝影測量處理有可能改變原始圖像的DN(Digital number)值[42],這在定量遙感應用中往往是不能接受的,因此還需要探索更好的多光譜圖像攝影測量處理方法[37]。
2.2 輻射校正
輻射校正為將傳感器的DN值轉換為傳感器的輻射亮度提供傳遞函數,用于克服太陽角度、雙向反射分布函數(BRDF)效應、云的陰影、相機增益及曝光時間等因素對傳感器測量值的影響[8]。輻射校正的流程如圖5所示。
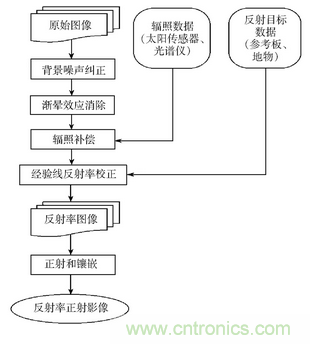
圖5 輻射校正流程圖
由于飛行高度較低,通常無人機影像相比衛星及有人飛機獲取的影像具有更好的輻射均一性[46],可以省略大氣糾正[47]。
輻射校正之前需要針對每幅圖像進行背景噪聲消除和漸暈效應消除[48]。圖像背景噪聲源可分為信號相關噪聲(光子散粒噪聲)和信號無關噪聲(暗電流、放大器噪聲、量化誤差)。只要噪聲不超過模數轉換器的量化間隔,這些噪聲源中的一些(如量化誤差)就可以忽略不計。 然而,多光譜相機可能會受到非隨機誤差的影響[49],這會降低最終的圖像質量。漸暈效應指的是當從其主點徑向偏離時,圖像的亮度衰減的效果。這種現象是由相機鏡頭光圈的有效尺寸引起的,暈映效應與鏡頭光圈尺寸成比例變化。此外,漸暈與焦距有關,廣角鏡頭更受這種現象的影響。背景噪聲與漸暈效應一般是在相機出廠時進行了測試,相應的誤差糾正系數寫在了相機里面,用戶數據處理時,需要首先獲得這些糾正參數,然后再對多光譜圖像進行逐像素的糾正處理。針對每幅圖像進行上述的糾正操作,得到一系列的經過DN值修正的新圖像。
多光譜圖像的輻射校正一般采用替代輻射校正法(Vicarious radiometric calibration),這種方法是一種現場測量與校正方法??紤]到每個像素的DN值與傳感器探測到的輻射具有直接的關系,對于相機的每個光譜通道,可以建立相應通道的DN值與輻射的關系模型。以RedEdge相機為例,輻射校正所建立的輻射傳輸模型為
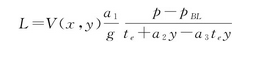 (2)
(2)式中 p——歸一化的像素DN值
pBL——暗電流校準值
a1、a2、a3——輻射校正因子
V(x,y)——漸暈校正多項式
te——曝光時間
g——傳感器增益
x、y——像素位置
L——輻射值,W/(m2·sr·nm)
該輻射模型將圖像的原始像素DN值轉換為絕對光譜輻射值。它補償了傳感器暗電流、傳感器的靈敏度、傳感器增益和曝光設置以及鏡頭暈影效應。模型中使用的所有參數都可以從RedEdge像機保存的TIFF文件中的XMP元數據中讀取。
選入“少兒萬有經典文庫”的原典在人類科學史上的重要性和經典性不容置疑,但其厚重的篇幅和深邃的理論體系,讓一般讀者都可能望而卻步,更不要說理解能力有限的少年兒童。而在這套文庫里,少兒彩繪版呈現出生機勃勃的氣息,吸引著小讀者從容地走進經典。
利用同樣的輻射傳輸模型,構建基于一個或者多個參考目標的反射率與光譜輻射的經驗線模型,實現最終的輻射校正。DEL POZO等[48]分析了影響多光譜相機輸出值(DN)的因素,并且給出了詳細的基于標準地物的替代輻射校正方法,結果表明平均的輻射測量誤差在2.5%以內。AHMED等[38]基于具有已知反照率值的參考目標板,在每次飛行之前在地面上與成像的多光譜圖像進行了輻射測量校準[50],利用ASD地物光譜儀(ASD Inc., Boulder, CO, USA)在全天的多個光亮度不同時段測量標準目標并獲得光譜反射率,使用經驗線校準方法[51-52]來校準多光譜影像的反射率數據,研究中使用了橙色、紅色、白色和黑色防水油布和塑料片作為校準目標。采用類似的校準方法,VON BUEREN等[53]比較了無人機多光譜相機(MCA6)與地面光譜儀在反射率測量方面的一致性,通過測量不同的地物目標的反射率,得到其決定關系R2=0.92。高林等[43]為避免立地間獲得的ADC Lite多光譜數據的時間與天空條件的差異影響,采用偽不變地物輻射糾正法,通過地面目標測得的反射率將多光譜圖像值轉換為圖像反射率?,F場的輻射校正方法需要均質的朗伯表面,已有研究表明,選擇人造目標要比使用偽不變特征(Pseudo-invariant features)更為有效[54]。
為了減少飛行中光線變化對反射率的影響,越來越多的多光譜相機開始配置一個向上的太陽光傳感器,同步記錄拍照時刻的入射環境光能量,用于更精確的輻射校準,隨著技術發展,有可能將目前依賴地面標準板的輻射校正流程大大簡化。
2.3 專題圖生成
利用無人機多光譜影像數據可以生成植被指數、數字表面模型(DSM)等信息。圖6為歸一化植被指數NDVI圖像。圖7為數字表面模型DSM圖像。將這些信息與具體應用建立關系,可以生成不同的應用專題圖。
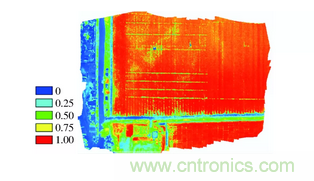
圖6 棉田歸一化植被指數(NDVI)圖(2017年,新疆維吾爾自治區石河子市)
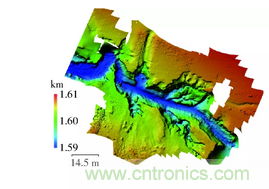
圖7 多光譜相機拍攝生成的DSM圖像(2017年,寧夏回族自治區吳忠市)
3 小型無人機多光譜遙感應用
低空無人機搭載不同的多光譜載荷獲取影像,在中小尺度高精度遙感監測中優勢明顯,尤其在農業、林業、生態等領域的應用比較廣泛。無人機多光譜系統能夠在一定程度上改變傳統地面人工測量或者調查效率低、時效性差及標準不統一等問題,可為具體應用提供高效決策信息。
3.1 植被長勢/營養/脅迫監測
不同植被其氮素、葉綠素、蛋白質和細胞水分等含量各不相同,從而影響植被冠層群體的反射光譜,這為采用光譜遙感方法進行植被生化組分反演提供了理論依據[55]。通過長勢/營養監測可及時了解植被的生長狀況、水肥病害脅迫及營養狀況,便于及時采取各種管理措施, 從而保證植被的正常生長并最大化減少對環境的破壞。
氮素是植被生長的核心元素之一,對作物產量和生產利潤影響巨大[55]。LU等[56]利用無人機搭載Mini MCA多光譜相機進行了水稻氮素含量研究,利用紅邊植被指數(REDVI)實現了最優的氮素估算結果,R2=0.87。BALLESTER等[57]利用無人機搭載RedEdge多光譜相機進行了整個生長季的棉花氮素時空分布研究,結果表明,在生長的早期階段,對氮素含量進行評價的最佳指標為SCCCI(Simplified canopy chlorophyll content index)指數,而到了生長季的后期,最佳指標是NDRE(Normalized difference red edge index)指數。葉綠素含量是植物生理生化及生態調查中最重要的量測參數之一,它不僅是植物營養狀況、光合作用能力和發育階段的良好指示劑,也是評價植物健康的指標之一。BERNI等[27]利用無人機搭載MCA 6多光譜相機獲取橄欖樹的多光譜影像,建立基于土壤調節植被指數的葉綠素預測模型,模型擬合決定系數R2=0.89。LU等[58]進行了草地葉綠素含量的監測研究。HERNNDEZ-CLEMENTE等[59]提出一個簡單比值指數(R515/R570)并探討了利用無人機多光譜圖像繪制森林類胡蘿卜素含量圖以評估其生理狀況的可行性,研究采用的多光譜傳感器為MCA 6,并使用定制的濾光片實現多光譜分光,結果表明該指數在葉片及冠層尺度上都與森林的類胡蘿卜素顯著相關。肖宇釗[60]利用無人機模擬平臺搭載多光譜相機對油菜進行低空遙感試驗,發現利用優選植被指數建立線性的預測模型效果較好。PRIMICERIO等[61]利用無人機搭載ADC lite多光譜相機對葡萄園長勢進行了研究,結果表明根據歸一化差異植被指數生成的活力圖顯示了作物生長的異質性條件,與地面觀測結果基本吻合。秦占飛等[62]利用738、522 nm比值光譜指數RSI(Ratio spectral index)構建線性模型對水稻葉片全氮含量進行預測,R2為0.673。ZARCO-TEJADA等[63]將無人機多光譜應用于檢測水分脅迫引起的葉綠素熒光的變化,配合氧氣吸收波段的窄帶濾光片獲取特征波段多光譜圖像,實現了冠層大尺度葉綠素熒光的成像檢測。SUREZ等[64]將搭載MCA-6相機的無人機多光譜系統應用于水分脅迫研究,結果表明長時間序列的歸一化光化學反射PRI指數(PRI/PAR)與同期樹木受到的水分脅迫相匹配。
多元線性回歸、偏最小二乘和逐步線性回歸等建模方法在無人機遙感解析植被冠層氮素、葉綠素等生化組分信息時具有廣泛的應用[65]。由于波段間反射率有著密切的關系,造成線性模型所需參數的重復,因此目前研究者在遙感反演參數時轉向偏最小二乘法、主成分分析、人工神經網絡和深度學習等方法,結合高光譜遙感信息,構建包含更多波段的模型,以期更好的解釋模型預測的變異。植被長勢及營養監測是目前無人機多光譜系統應用最廣泛的領域,為精準農業中的作物管理及施肥決策提供了有力的數據采集工具,同時,挑戰性在于不同作物類型、不同生長時期的植被長勢/營養的預測模型存在普適性問題。
3.2 精細分類與地物識別
精確的土地分類與物種識別對資源管理、調查和運營非常重要[66]。已有研究在利用無人機多光譜數據開展森分制圖、樹木表型[67]、樹種識別[68]、雜草識別[69]、三維幾何特征提取[33]等方面都取得了一些成果。FASSNACHT等[70]對遙感在樹種識別方面的研究進行了綜述,指出利用多光譜相機獲取的光譜、紋理及結構信息及其組合可以用于樹種的識別。DIAZVARELA等[22]利用無人機多光譜相機獲取的光譜信息和DSM信息組合應用于農業梯田的識別,提出的識別方法的精度達到90%以上。MORA等[71]在北極苔原上應用可見光和近紅外高分辨率無人機影像進行識別研究,結果表明對苔原植被類型的識別精度達到84%,但是由于種間相似度高,物種個體小,因此無法區分物種。以校準后的多光譜數據為數據源,以現場數據為驗證樣本,AHMED等[38]應用無人機搭載Parrot Sequoia多光譜相機對安大略省中部試驗區的植被種類進行了基于對象的分類準確度評價研究,結果表明,針對5個土地覆蓋類型(森林、灌木、草本、裸土和建成區),分類精度高達95%,當分析更詳細的植被物種類型(包括個體落葉樹種、灌木社區和農作物)時,多光譜數據的分類精度約為89%。GINI等[40]利用兩個相機組合(RGB和NIR)進行基于無人機多光譜的樹種識別研究,結果表明采用監督分類的物種分類精度為80%。LU等[72]將無人機多光譜引入草地物種組成的時空變化研究,結果表明,無人機獲得的多光譜影像具有較高的空間分辨率,是研究小尺度草地物種組成的不可比擬的數據源,總體準確率約為85%。趙慶展等[73]以瑪納斯河畔為研究區,使用固定翼無人機搭載Micro MCA12 Snap多光譜傳感器獲取高分辨率多光譜影像,提出將光譜特征、紋理特征信息與最佳波段指數結合的方法來確定地物分類最佳波段組合。LPEZ-GRANADOS等[74]利用無人機搭載MCA6多光譜相機實現了早期的雜草識別和精確制圖。TORRES-SNCHEZ等[33]將Tetracam MCA 6多光譜相機搭載到四軸旋翼無人機MD4-1000 (microdrones GmbH, Siegen, Germany)上,進行高通量的樹木種植狀況調查,多光譜數據被應用于構建植被指數來實現圖像分類,區別土壤和植被,最終獲取單株樹高、冠幅等結構信息。另外,研究發現飛行高度對最終的結果影響不大,因此可以采取較高的飛行高度以加快數據采集及處理流程。
1.2.2 提出循證問題 將系統收集的資料,通過科學分析,結合文獻資料,提出循證問題“如何對上消化道出血患者進行健康教育”。
現有研究表明,分類方法主要分為面向對象和面向像素[66]兩種,分類和地物識別精度與研究地的生境和植被類型密切相關,生境越復雜,個體越小,種間相似度越高,識別精度越低[10]。相對于傳統的調查和監測方法,無人機在可達性和抗干擾性方面表現優越,可以安全高效地獲取地物分類數據。
3.3 病蟲害監測與分析
病蟲害會造成巨大的生產損失,而早期診斷是降低損失的有效途徑。植被受到病蟲害脅迫后會導致葉片色素及冠層結構的改變[75],特別是葉片葉綠素含量會發生改變,因此對葉綠素含量敏感的光譜特征可用于病蟲害遙感診斷中[76]。在植被病害方面,研究主要包括病害指數提取、病害識別、病害時空監測等。劉良云等[77]與羅菊花等[78]利用多時相的高光譜航空圖像對冬小麥條銹病進行了監測,提取敏感波段建立病情指數對發病區域及程度進行評價,這些敏感波段可以用于指導病害監測的波段選擇。NEBIKER等[24]利用Canon S110 NIR相機獲取NDVI指數,對馬鈴薯和洋蔥栽培中的植物病害檢測進行了定性研究,用于確定病害的原始侵染地點、病害的防治效果以及病害的發生模式等。YANG等[79]利用高分辨率多光譜和高光譜航空影像數據提取了棉花根腐病的發生范圍,結果顯示這兩類數據監測結果的精度差別并不顯著,表明多光譜數據具有大范圍病害監測的應用潛力。CALDERN等[80]利用無人機搭載多光譜相機和熱紅外相機獲取橄欖樹圖像,診斷橄欖樹黃萎病,發現早期黃萎病與綠光波段相關,隨著病情加重,葉綠素熒光指數下降。
DASH等[81]利用無人機搭載RedEdge多光譜相機進行病害爆發監測研究,結果表明,無人機的多光譜圖像提供了一種有效的檢測方法來監控森林疾病爆發所導致的葉片變色癥狀。在蟲害監測方面,主要包括監測方法研究、侵染目標識別研究等。LEHMANN等 [44]利用無人機多光譜圖像和基于對象的圖像處理方法來監測橡樹的蟲害。SAMSEEMOUNG等[82]應用無人機多光譜系統識別油棕櫚樹的蟲害。ZHANG等[83]在對蟲害早期分級研究中采用了包括無人機高光譜在內的多源數據,利用高光譜數據提取植被指數進而對葉綠素含量進行反演,為多光譜在病蟲害預測及早期診斷的應用提供了可能性。當前植被病蟲害遙感診斷方法都主要集中在光譜特征的利用上,但是目前僅僅用遙感方法具有較大的局限性[76],如黃文江[84]指出多源遙感數據與氣象、病蟲害調查數據相結合是發展的方向之一。另外,病蟲害具有類型多樣、影響因素復雜、發生發展迅速等特點,如果病害發生的熱點區域和關鍵時期不能迅速響應將失去病害監測與響應的時機。遙感數據能夠提供面狀連續的數據,結合關鍵地區無人機多光譜數據,則能夠提供點狀的連續時相的數據[75],兩者點面結合、優勢互補可以為病蟲害監測提供更全面信息。
3.4 區域高精度葉面積指數提取
葉面積指數(LAI)指單位土地面積上植物葉片總面積占土地面積的比例,它是表征作物幾何結構的關鍵生理物理參數,與光合作用、蒸騰作用、碳循環等生物物理過程密切相關。LELONE等[23]將改造的多光譜相機搭載在電動固定翼無人機上,對法國西南部小麥實驗田進行監測,基于獲取的可見光-近紅外波段的多光譜影像分析了植被指數(NDVI、GNDVI)與生物物理參數(LAI、氮吸收量)之間的聯系,相關系數達到0.82以上。采用類似的硬件方案,LU等[58]對草地的LAI提取進行了研究。楊貴軍等[45]利用電動六旋翼無人機搭載ADC Lite多光譜相機獲取了小麥的多光譜數據,經波段計算提取歸一化植被指數NDVI、土壤調節植被指數 OSAVI、氮素反射指數 NRI等與作物生長狀態敏感的多種植被指數,利用LAI-2000型葉面積指數儀獲取地面實測數據,結果表明 NDVI 與作物 LAI 相關性最大,其模型驗證R2為0.48,均方根誤差為0.27。高林等[43]以大豆為研究對象,分析了多源遙感數據對葉面積指數的估測精度,通過構建植被指數與地面實測LAI數據的經驗回歸模型表明,針對星、機、地3類遙感信息源,地面高光譜數據在反演LAI方面較傳統多光譜數據有優勢但不突出,在保證獲得高精度大豆LAI預測值和高工作效率的前提條件下,基于無人機遙感的多光譜獲取技術為最佳試驗方案。KALISPERAKIS等[85]利用無人機高光譜相機提取的窄波段NDVI來反演葉面積指數,其相關性為84%。TIAN等[86]利用無人機搭載RedEdge多光譜相機對紅樹林葉面積指數進行了研究,提出了Scaled NDVI指數來預測植被指數,其精度較高(R2=0.817),相比WorldView-2衛星數據的反演結果,無人機多光譜數據可有效消除背景影響且分辨率更高,因此在長勢均勻或者較低LAI的樣方里面應用效果更好。BERNI等[27]利用MCA 6多光譜相機獲取橄欖樹的多光譜影像建立LAI預測模型,決定系數達到R2=0.88。
4)在一定的工程邊界條件及設計原則下,新方案飽和煙氣的加熱功率要比常規方案小10.511 6 MW,此部分熱量可用于預熱冷風,折算為機組增加的發電功率2.185 4 MW,新方案可利用的飽和煙氣余熱功率為10.570 4 MW,在考慮煙氣余熱用于凝結水系統和不考慮煙氣余熱用于凝結水系統兩種情況下,機組效率分別增加0.231%、0.164%,節能效果更好。
大量研究表明,背景和植被類型的影響是制約植被反演精度的2個關鍵因素[86-87]?,F有基于無人機多光譜遙感提取作物葉面積指數的研究大都是通過植被指數與實測LAI建立經驗模型實現,或者基于輻射傳輸模型和光譜數據[88]來建立機理模型實現 。其在研究對象的選擇上往往具有背景均勻、植被類型單一的特征。然而,大多數的復雜生態系統中,如沿海紅樹林,很可能是背景復雜,植被類型多樣,故葉面積指數提取的難度也較大。
3.5 區域高精度植被覆蓋度提取
植被覆蓋度(FVC)通常定義為統計范圍內植被的垂直投影面積所占的百分比,它能夠直觀地反映植被的生長狀況,是指示生態環境變化的重要指標之一[89]。利用低空高分辨率實測數據作為樣本的實測數據源是植被覆蓋度遙感反演的發展趨勢,多光譜相機提取的EVI或者NDVI指數等作為模型的輸入因子,取得了較好結果。劉峰等[13]利用汽油無人直升機搭載ADC Air多光譜相機,對板栗覆蓋度進行了研究,基于植被土壤光譜差異,提出了無人機多光譜植被覆蓋度的快速計算方法,進而利用多時相的無人機多光譜遙感影像實現了植被覆蓋度年度變化監測。李冰等[5]設計了一套以無人機為平臺的低空多光譜載荷觀測系統,對冬小麥覆蓋度變化進行監測。周在明等[90]利用四旋翼無人機搭載ADC Air相機對灘涂濕地入侵物種互花米草的植被覆蓋度進行了研究,通過NDVI指數模型獲取多光譜植被覆蓋度信息,以高精度可見光影像為真值進行驗證。結果表明NDVI模型估算值與真實值之間的決定系數為0.92,具有較好的一致性。相比目前廣泛應用的無人機可見光圖像[91-92],利用無人機多光譜圖像反演植被覆蓋度時圖像的空間分辨率要求較低[90],CHAPMAN等[12]利用最優線性無偏預測方法獲取的高粱植被覆蓋度與地面真實數據的決定系數為 0.88。
目前的研究中,主要是通過計算機視覺方法或植被指數建模反演等方法獲得作物的冠層覆蓋度信息。今后研究中還需要探索更普適性方法實現不同植被覆蓋度的準確提取。
3.6 田塊尺度的作物估產
遙感估產是基于作物特有的波譜反射特征,利用遙感手段對作物產量進行監測預報的一種技術。利用影像的光譜信息可以反演作物的生長信息,通過建立生長信息與產量間的關聯模型,便可預估作物產量。在實際工作中,基于遙感手段構建產量預測模型所使用的參數包括生育期長度、葉綠素含量、葉面積指數、生物量、光譜反射率和植被指數等。
基于作物特有的波譜反射特征,通過構建包含多種植被指數的遙感反演模型,可以實現作物產量的預測[93]。PEA-BARRAGN等[94]利用可見光相機結合紅外相機組成的機載多光譜采集系統研究了向日葵產量與作物多時間光譜數據之間的關系,發現利用早期生長期采集的NDVI與產量之間的線性模型決定系數為0.6,另外,還發現不同太陽角度下獲取的多光譜圖像的NDVI變化不大,因此多光譜拍攝時刻不影響模型相關關系。ZARCOTEJADA等[95]也指出利用棉花早期的NDVI植被指數可以與產量建立很好關系。進一步地,BALLESTER等[57]的研究表明早期的SCCCI和NDRE指數與皮棉產量具有顯著的線性回歸關系,而隨著氮素需求變大,氮素成為主要生長限制因子時,NDVI指數相比SCCCI和NDRE指數具有更好的產量預測精度。VEGA等[88]利用MD4-200型旋翼無人機(Microdrones GmbH’s VTOL UAV, Siegen, Germany)搭載3波段多光譜相機——ADC lite多光譜相機對經過不同小區處理向日葵的產量預測進行了研究,結果表明利用多光譜DN值計算的NDVI與產量也具有很好的線性關系。楊貴軍等[45]利用無人機多光譜影像計算得到 NDVI,結合氮肥優化算法(Nitrogen fertilization optimization algorithm,NFOA)開展小麥潛在產量預測。NFOA 算法中通過定義當季估產指數(In-season estimate of yield,INSEY)預測小麥潛在產量,該 INSEY指數由 NDVI 除以自播種之日起到測定冠層光譜期間(Grow degree days,GDD) 的天數得到。利用上述方法預測產量與小區實際產量進行對比分析,其估算精度較高(R2=0.72)。DUAN等[96]的研究發現,經過地面覆蓋率調整后,開花期NDVI與小麥最終產量有較高的相關性,表明多源數據融合能更深入地反映作物的適應機制。NEBIKER等[24]利用MultiSPEC 4C多光譜相機開展了油菜和大麥產量預測,結果表明油菜所有小區品種的產量和NDVI值之間的相關性為78%,大麥產量與NDRE指數的相關性為87%。YU等[97]利用無人機多光譜進行了大豆產量預測及成熟期識別研究,顯著提高了產量預測的精度(R=0.82),并且識別大豆成熟期的精度可以達到93%。ZHOU等[98]利用無人機搭載Mini-MCA多光譜相機預測谷物產量,提出孕穗期為最佳的預測時間,并且NDVI和VARI為最佳的預測指數,同時多時相的植被指數與產量相關性更高。
從目前的文獻看,NDVI植被指數在產量預測中發揮著重要的作用。利用無人機多光譜系統獲取多光譜圖像來預測作物產量時,具有成本低、天氣影響小、拍攝時間寬裕、對圖像分辨率不敏感的優點。由于可以在合適的生育期對作物產量進行預測,可以在收獲前對某些問題進行提前診斷,提前實施相應的精準農業操作,從而獲得更好的經濟及環境效益[88]。融合農學知識、作物生長模型與遙感指標構建精度高、通用性強的產量預測模型,對應用無人機遙感進行作物產量預測至關重要[99]。
3.7 生物量估算
生物量是指某一時刻單位面積內實存生活的有機物質(干重)總量。生物量是生態系統結構優劣和功能高低的最直接的表現,是生態系統環境質量的綜合體現。同時,生物量的定量估算為碳循環研究提供了重要的參考。楊鵬萬等[100]利用藏北高寒草甸地上生物量和ADC便攜式多光譜相機數據,建立了植被指數估算藏北高寒草甸地上生物量的模型。在分析了地上生物量與歸一化植被指數NDVI、歸一化綠波段差值植被指數GNDVI和土壤調節植被指數SAVI相關關系的基礎上,構建了地上生物量和各植被指數的7種模型,并對擬合效果比較好的模型進行了精度檢驗。結果表明3個植被指數中NDVI的模擬效果最好, GNDVI最差;所有模型中,以NDVI為自變量的線性模型、以SAVI為自變量的線性模型和冪函數模型模擬和預測效果都很好。在VEGA等[88]對向日葵生物量的研究中,也表明利用多光譜相機的DN值計算的歸一化植被指數NDVI與生物量具有很好的線性關系。生物量是作物表型的一個重要參數,AICH等[101]提出了一套基于深度學習的估算方法,并將無人機多光譜數據用于小麥生物量估算中,獲得較高的估算精度。
在今后的研究中將高精度的DSM數據與光譜數據相結合,利用獲取的植被結構信息進行輔助,有可能提高生物量估算的精度。
3.8 群落調查及生物多樣性評價
生物多樣性是一個描述自然界多樣性程度的內容廣泛的概念,是生物及其環境形成的生態復合體以及與此相關的各種生態過程的綜合。BOON等[102]在南非利用固定翼無人機搭載RedEdge多光譜相機用于濕地植被完整性的調查和生態系統制圖,結果可以用于濕地擾動等級、面積的精確評價。MINAK等[42]將無人機多光譜遙感技術引入到森林干擾研究中,利用多光譜圖像提取植被指數來區分森林干擾類別。CHABOT等[25]應用無人機多光譜監測水生入侵植被,基于光譜特征的隨機森林方法的分類精度達到81%。LASSAU等[103]探索了利用航空多光譜數據獲得的歸一化差異植被指數NDVI和近紅外光譜中反射率的標準偏差stdevRNIR作為悉尼北部砂巖森林棲息地復雜度的指標,研究發現在NDVI植被指數和棲息地復雜度之間存在強烈相關關系。與定量研究相結合的遙感技術可預測動物對景觀尺度的植被結構和生物量的響應,并為特定棲息地的生物多樣性保護提供有效的管理手段。
盡管不能完全代替現場人工調查,無人機遙感系統可以在群落尺度上進行生物多樣性評估,憑借其速度快、可到達性強的優勢可以顯著提高群落調查的面積和效率,從而節約大量的人力物力。
3.9 高通量作物表型研究
植物表型是受基因和環境因素決定或影響的, 反映植物結構及組成、植物生長發育過程及結果的全部物理、生理、生化特征和性狀。作物表型信息是揭示作物生長發育規律、環境與管理措施等關系的重要依據[104]。傳統的表型組學的研究技術和方法仍然停留在使用傳統的測量儀器、數字圖像分析[105]等方法階段,田間試驗取樣測定作物性狀參數的方法耗時耗力,且空間覆蓋有限,成為當前農學、育種等作物科學研究的發展瓶頸,而以無人機為代表的近地遙感高通量表型平臺憑借機動靈活、成本低、空間覆蓋廣的優勢成為獲取田間作物表型信息的重要手段[6,99]。
現有研究表明,無人機多光譜遙感系統中的可見光相機可以用于花期[106]、株高[107]、倒伏[108]、植被覆蓋度[12]等結構與形態相關參數的獲取,而多光譜相機可以用于葉面積指數[43,109]、生物量[101]、產量[96]、出苗率[101]、返青率[110]、氮素含量[57]、葉綠素含量[111]等參數的獲取,紅外波段的相機可以用于冠層溫度[28]等脅迫指標參數的獲取。具體地,WATANABE等[112]利用無人機多光譜系統進行了高粱株高的測量,測量值輸入基因預測模型后,獲取的預測值與真實值的相關系數為0.84。DUAN等[96]利用無人機搭載RedEdge多光譜相機,構建了一套以測量地塊尺度NDVI指數為主的高通量作物表型平臺,用于監測小麥的農學和育種特性,獲取的飛行數據與手持設備測量的地面NDVI數據具有高度的相關性,可以實現快速、有效的NDVI數據獲取,并且產量與NDVI的決定系數達到0.82。ZAMANALLAH等[55]利用固定翼無人機搭載ADC-lite多光譜相機用來研究玉米在缺氮脅迫/衰老下的長勢空間變異特征,并利用無人機多光譜的NDVI數據進行產量預測。GMEZ-CANDN等[28]提出了一種融合熱紅外(Thermoteknix Miricle)、多光譜相機(Sigma DP1x)的多波段的作物表型無人機遙感系統,獲取的多時相的具有精確位置坐標的正射紅外圖像可以用于單木尺度的樹木水分脅迫狀態判別。HAGHIGHATTALAB等[113]研究了無人機多光譜系統在獲取小麥育種小區植被指數方面的應用,并對使用的兩種多光譜相機遙感系統進行了比較,兩者獲取的植被指數與地面測量值具有較好的相關性。
高通量的作物表型平臺可應用于農學、植物生理和育種研究,用于探討基因、環境和管理措施之間復雜的相互作用。在未來的無人機遙感解析作物表型信息研究應用中,需深入挖掘高光譜、LiDAR等傳感器信息,融合多傳感器的數據構建通用性強、精度高的作物表型信息解析模型。
3.10 其他應用
無人機多光譜遙感還可以提供一種快速、定量、高效的作物災害損失評估方法,如ZHOU等[114]將無人機多光譜應用于馬鈴薯冰雹災害評估中,研究表明土壤調節植被指數對冰雹災害最為敏感。此外,無人機多光譜遙感還應用于自然遺產保護[115]、物候監測[116]、灌溉設施識別[117]等研究中。
4 討論與建議
無人機多光譜遙感技術雖然近來年得到了廣泛的發展,但尚存在以下問題,需要在后續的無人機多光譜遙感中重點關注和解決,具體包括:
(1)無人機大面積作業續航時間受限問題。無人機航拍覆蓋范圍比地面測量廣,與衛星資料的空間匹配度更高,無人機方法是對目前地面實測方法的巨大改進,可以高效、便捷地獲取更大空間范圍的地面觀測資料,從而克服傳統地表調查方法與衛星數據的空間匹配性問題,提高遙感反演的精度[92]。但是,目前電動無人機普遍存在航時較短的問題,一次路徑規劃無法實現大面積的信息獲取,并且對環境要求比較高,難以適應復雜的地勢環境,通信信號易受干擾,因此,大區域的應用還受到限制。
(2)無人機影像的幾何和輻射校正問題。目前大多數無人機多光譜影像分辨率較低,特征點匹配難度大,幾何校正效率和精度有待提高。多光譜傳感器在無人機飛行過程中受飛行穩定性及光照環境變化影響,不同時刻采集的數據出現輻射非均一性,對圖像進行輻射校正的方法一般為半手工方式,操作較為復雜。為此,后續應用過程中必須研究針對所有數據的輻射校正算法,消除輻射非均一性對后續參量估算的影響。而且,目前的數據解析往往通過地面實測數據建立經驗回歸模型,模型受作物種植區域、作物類型以及作物生育期等影響較大,后續需利用多種作物觀測數據建立通用性模型,并保證模型解析精度滿足實際需求。建議在今后研究中,著重加強輻射校準的研究,探索通用性輻射校準方法,減少對地面定標的需求,提供具有更加準確輻射信息或者反射率信息的多光譜圖像,為提高后續應用的精度奠定基礎。
(3)無人機多光譜載荷和傳感器波段受限問題。目前的多光譜相機具有波段數目有限(小于12),波段寬度比較寬(大于10 nm)的特點,這導致不能準確捕獲植被在某些敏感波段的精細反應,不能滿足精細分類或者探測的需要[40]。隨著技術發展,無人機高光譜傳感器在體積、重量上越來越小,數據傳輸及處理也逐漸成熟,有可能會更加普及[118]。本文中無人機載荷聚焦于小型的多光譜相機,但是在面向具體的應用時,要根據需求提出最優的載荷配置方案,微型高光譜儀[119]、成像高光譜儀[120]、紫外相機、熱紅外相機[29]等都具有各自獨特的優勢及應用價值。
(4)無人機多光譜遙感的尺度效應問題。由于地表空間異質性的普遍存在,任何非線性遙感模型反演產品都存在尺度效應問題[43]。CURRAN等[121]研究了樣方大小對地表實測草地遙感反演結果的影響,證明樣方尺寸是影響測量精度的重要因素。因此在將無人機數據與衛星數據、地面數據[122]建立模型時,需要將尺度問題考慮在內。建議各行業部門的專業人員與遙感、計算機科學等領域的專家密切合作,制訂無人機多光譜遙感技術的相關標準和規范,共同開發推進并普及無人機多光譜遙感技術。
參考文獻
1 童慶禧, 田國良, 茅亞瀾. 多光譜遙感波段選擇方法的研究[J]. 宇航學報, 1983, 4(2): 4-16.
2 王斌永, 舒嶸, 賈建軍,等. 無人機載小型多光譜成像儀的設計[J]. 光學與光電技術, 2004,2(2):18-20.
WANG Binyong, SHU Rong, JIA Jianjun, et al. Design of compact multispectral imager for UAV[J]. Optics & Optoelectronic Technology, 2004,2(2): 18-20. (in Chinese)
3 廖小罕, 周成虎. 輕小型無人機遙感發展報告[M]. 北京: 科學出版社, 2016.
4 MARRIS, EMMA. Drones in science: fly, and bring me data [J]. Nature, 2013, 498(7453): 156.
5 李冰, 劉镕源, 劉素紅, 等. 基于低空無人機遙感的冬小麥覆蓋度變化監測 [J]. 農業工程學報, 2012, 28(13): 160-165.
LI Bing, LIU Rongyuan, LIU Suhong, et al. Monitoring vegetation coverage variation of winter wheat by low-altitude UAV remote sensing system[J]. Transactions of the CSAE, 2012(13): 160-165. (in Chinese)
6 YANG G, LIU J, ZHAO C, et al. Unmanned aerial vehicle remote sensing for field-based crop phenotyping: current status and perspectives[J]. Frontiers in Plant Science, 2017, 8:1111.
7 SANKARAN S, KHOT L R, ESPINOZA C Z, et al. Low-altitude, high-resolution aerial imaging systems for row and field crop phenotyping: a review [J]. European Journal of Agronomy, 2015, 70:112-123.
8 ZHANG C, KOVACS J M. The application of small unmanned aerial systems for precision agriculture: a review [J]. Precision Agriculture, 2012, 13(6): 693-712.
9 楊海軍, 李營, 朱海濤, 等. 無人機遙感技術在環境保護領域的應用 [J]. 高技術通訊, 2015, 25(6): 607-613.
YANG H J, LI Y, ZHU H T, et al.UAV remote sensing’s applications in the environmental protection field [J]. Chinese High Technology Letters, 2015, 25(6): 607-613. (in Chinese)
10 孫中宇, 陳燕喬, 楊龍, 等. 輕小型無人機低空遙感及其在生態學中的應用進展 [J]. 應用生態學報, 2017, 28(2): 528-536.
SUN Z Y, CHEN Y Q, YANG L, et al. Small unmanned aerial vehicles for low-altitude remote sensing and its application progress in ecology[J]. Chinese Journal of Applied Ecology, 2017, 28(2): 528-536. (in Chinese)
11 GAGO J, DOUTHE C, COOPMAN R E, et al. UAVs challenge to assess water stress for sustainable agriculture [J]. Agricultural Water Management, 2015, 153(Supp.C): 9-19.
12 CHAPMAN S C, CHAN A, JACKWAY P, et al. Pheno-copter: a low-altitude, autonomous remote-sensing robotic helicopter for high-throughput field-based phenotyping [J]. Agronomy, 2014, 4(2): 279-301.
13 劉峰, 劉素紅, 向陽. 園地植被覆蓋度的無人機遙感監測研究 [J/OL]. 農業機械學報, 2014, 45(11): 250-257.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20141139&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.11.039.
LIU Feng,LIU Suhong,XIANG Yang.Study on monitoring fractional vegetation cover of garden plots by unmanned aerial vehicles[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(11):250-257. (in Chinese)
14 LINK J, SENNER D, CLAUPEIN W. Developing and evaluating an aerial sensor platform (ASP) to collect multispectral data for deriving management decisions in precision farming [J]. Computers & Electronics in Agriculture, 2013, 94(11): 20-28.
推薦閱讀:



