
【導讀】在“為工業4.0啟用可靠的基于狀態的有線監控——第1部分”一文中,我們介紹了ADI公司的有線接口解決方案,該方案幫助客戶縮短設計周期和測試時間,讓工業CbM解決方案更快地進入市場。本文探討了多個方面,包括選擇合適的MEMS加速度計和物理層,以及EMC性能和電源設計。此外,還包括第一部分介紹的三種設計解決方案和性能權衡。本文為第二部分,著重介紹第一部分展示的SPI至RS-485/RS-422設計解決方案的物理層設計考量。
為MEMS實現有線物理層接口的常見挑戰包括管理EMC可靠性和數據完整性。但是,在RS-485/RS-422長電纜上分布SPI之類的時鐘同步接口,同時在相同的雙絞線(虛假電源)上部署電源和數據時,會帶來更多挑戰。本文討論以下關鍵問題,并就物理層接口設計提供建議:
● 管理系統時間同步
● 推薦的數據速率與電纜長度
● 適用于共用電源和數據架構的濾波器設計和仿真
● 虛假電源結構中的無源元件性能權衡
● 元件選擇和系統設計窗口
● 試驗性測量
時間同步和電纜長度
設計SPI至RS-485/RS-422鏈路時,電纜和元件會影響系統時鐘和數據同步。在長電纜中傳輸時,SCLK信號會在電纜中產生傳播延遲,100米長的電纜會延遲約400ns到500 ns。對于MOSI數據傳輸,MOSI和SCLK會被電纜延遲同等時間。然而,從從機MISO發送到主機的數據會出現兩倍傳播延遲,因而不再與SCLK同步。可能的最大SPI SCLK基于系統傳播延遲設置,包括電纜傳播延遲,以及主機和從機元件傳播延遲。
圖1展示系統傳播延遲如何導致SPI主機上出現不準確的SPI MISO采樣。對于沒有采用RS-485/RS-422電纜的系統,MISO數據和SPI SCLK會以低延遲或無延遲同步。對于采用了電纜的系統,SPI從機上的MISO數據與SPI SCLK之間存在一個系統傳播延遲,如圖1中的tpd1所示。回到主機的MISO數據存在兩個系統傳播延遲,如tpd2所示。當數據由于電纜和元件傳播延遲而右移時,會發生不準確的數據采樣。
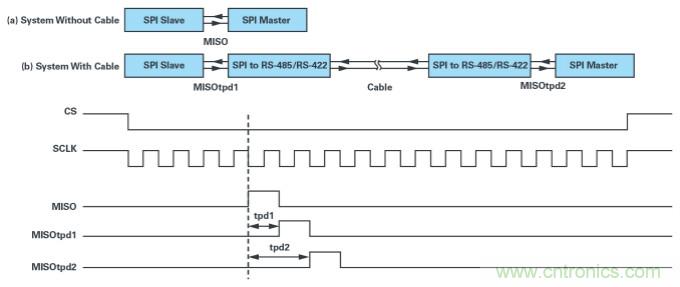
圖1.采用與不采用RS-485/RS-422長電纜的系統的MISO數據和SPI SCLK同步。
為了防止出現不準確的MISO采樣,可以縮短電纜長度、降低SPI SCLK,或者在主控制器中實施SPI SCLK補償方案(時鐘相位偏移)。理論上,系統傳播延遲應該小于SCLK時鐘周期的50%,以實現無錯通信;在實踐中,可以將系統延遲限值確定為SCLK的40%,這可以作為一般規則。
圖2針對1.1部分中描述的兩個SPI至RS-485/RS-422設計提供SPI SCLK和電纜長度指南。這種非隔離設計使用了ADI公司具備高速EMC穩健性的小型RS-485/RS-422器件(ADM3066E和ADM4168E)。這種隔離設計還采用了ADI公司的iCoupler®信號和電源隔離ADuM5401器件,可以為SPI至RS-485/RS-422鏈路提供更高的EMC穩健性和抗噪聲干擾性能。這種設計會增加系統傳播延遲,導致不可在更高的SPI SCLK速率下運行。在更長的電纜(超過30米)中傳輸時,強烈建議增加隔離,以幫助消除接地回路和EMC事件的影響,例如靜電放電(ESD)、電快速瞬變脈沖群(EFT),以及與數據傳輸電纜耦合的高壓浪涌。當電纜長度達到或超過30米時,隔離和非隔離設計的SPI SCLK和電纜長度性能相似,如圖2所示。
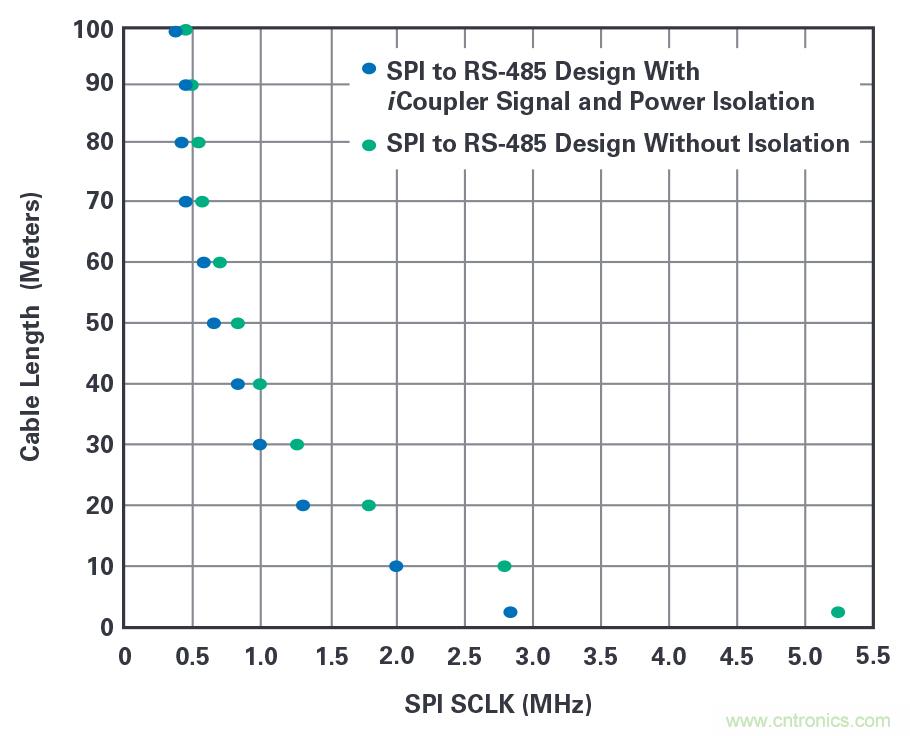
圖2.針對隔離和非隔離設計的SPI SCLK和電纜長度指南。
虛假電源
背景知識
虛假電源將電源和數據部署在一根雙絞線上,在主機和從機之間實現單電纜解決方案。將數據和電源部署在同一根電纜上,可以在空間有限的邊緣傳感器節點上實現單連接器解決方案。
電源和數據通過電感電容網絡分布在單根雙絞線上,具體如圖3所示。高頻數據通過串聯電容與數據線路耦合,可以保護RS-485/RS-422收發器免受直流總線電壓影響,如圖3a所示。圖3所示為通過連接至數據線路的電感連接至主機控制器的電源。如圖3b所示,5V直流電源對交流數據總線實施偏置。在圖3c中,電流路徑顯示為從機和主機之間的IPWR,使用電纜遠端基于狀態監控(CbM)的從機傳感器節點上電感從線路中獲取電源。
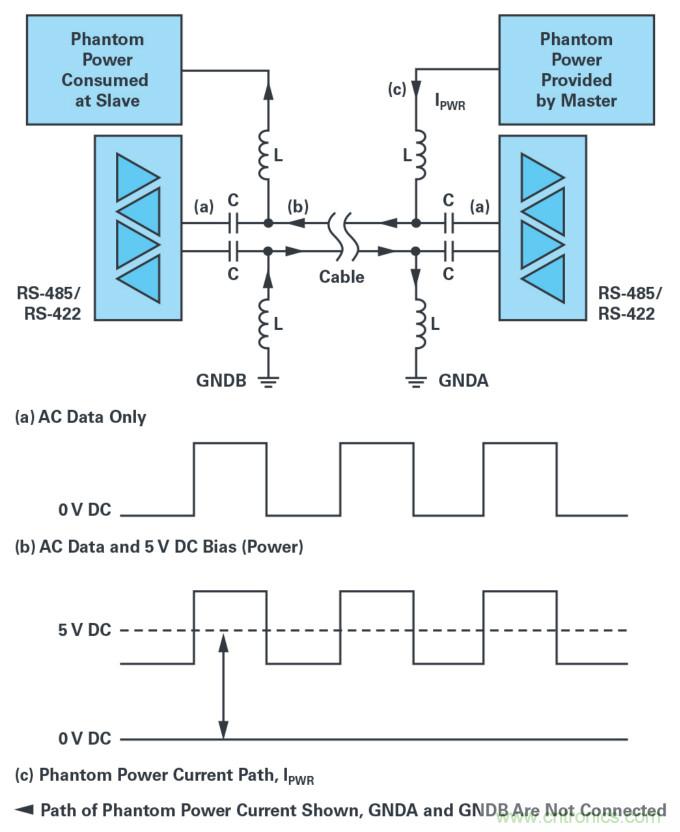
圖3.虛假電源物理層的交流和直流電壓電平。
高通濾波器
在本文中,假設將虛假電源電感電容網絡部署到兩根電纜中,這會部署SPI MISO信號的RS-485/RS-422轉換。圖4描述主機和從機SPI至RS-485/RS-422的設計,以及SPI MISO數據線的虛假電源濾波器電路。濾波器電路采用高通電纜,所以要求傳輸的數據信號不能包含直流內容或極低頻率的內容。
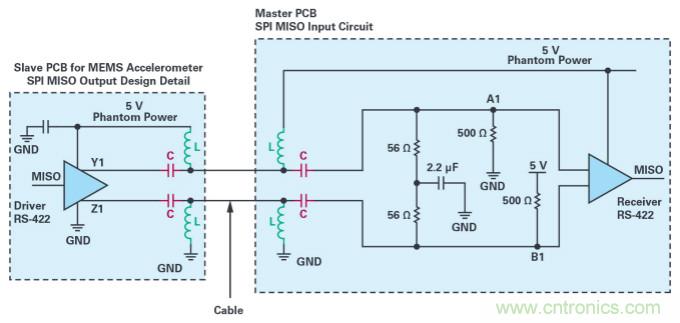
圖4.SPI至RS-485/RS-422設計和虛假電源濾波器電路。
圖5所示為二階高通濾波器電路,這是對圖4的簡化演示。RS-485/RS-422發射器的電壓輸出標記為VTX,R1具備15Ω輸出電阻。R2為30 kΩ,是RS-485/RS-422接收器的標準輸入電阻。電感(L)和電容(C)值可以選擇,以匹配所需的系統數據速率。
選擇電感(L)和電容(C)值時,需要考慮最大的RS-485/RS-422總線壓降和壓降時間,如圖6所示。存在一些標準,例如對于單根雙絞線以太網2,指出的最大可允許壓降和壓降時間如圖6a所示。對于有些系統,最大的可允許壓降和壓降時間值可能更大,受信號極性交越點限制,如圖6b所示。
壓降和壓降時間可與圖5中的仿真配對,以確定系統的高通頻率。
對于衰減出色的系統,高通濾波器截止頻率和壓降要求之間的關系如公式1.3所示

在SPI至RS-485/RS-422通信系統中增加虛假電源時,很顯然可允許的最低SPI SCLK速率會受虛假電源濾波器元件限制。
為了實現不含位錯誤的可靠通信,需要考慮最糟糕場景下的最低SPI SCLK,例如,當所有的SPI MISO采樣位處于邏輯高電平時,如圖7所示。如果所有的MISO采樣位都處于邏輯高電平,會導致位數據數率低于系統SPI SCLK。例如,如果SPI SCLK為2 MHz,且所有16個位都處于邏輯高電平,那么虛假電源LC濾波器網絡的速率相當于125 kHz的SPI MISO位數率。
如“時間同步和電纜長度”部分所示,電纜長度越長,需要的SPI SCLK速率越低。但是,虛假電源會限制最低的SPI SCLK速率。要平衡這些對立的要求,就需要小心選擇和確定無源濾波器元件的特性,尤其是電感。
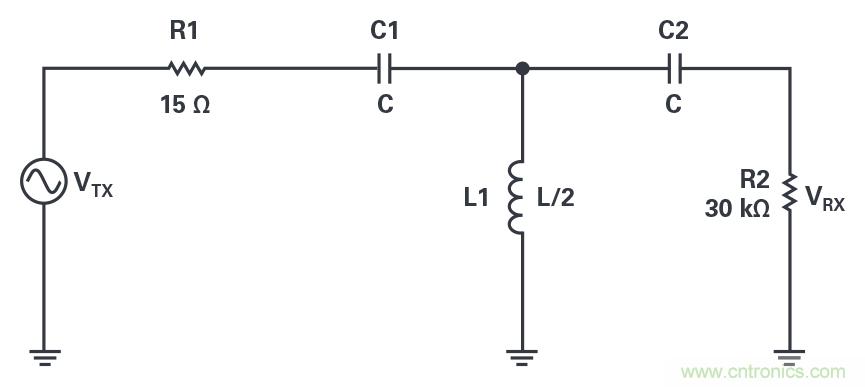
圖5.RS-422發射數據路徑和RS-485/RS-422接收數據路徑的二階高通濾波器。
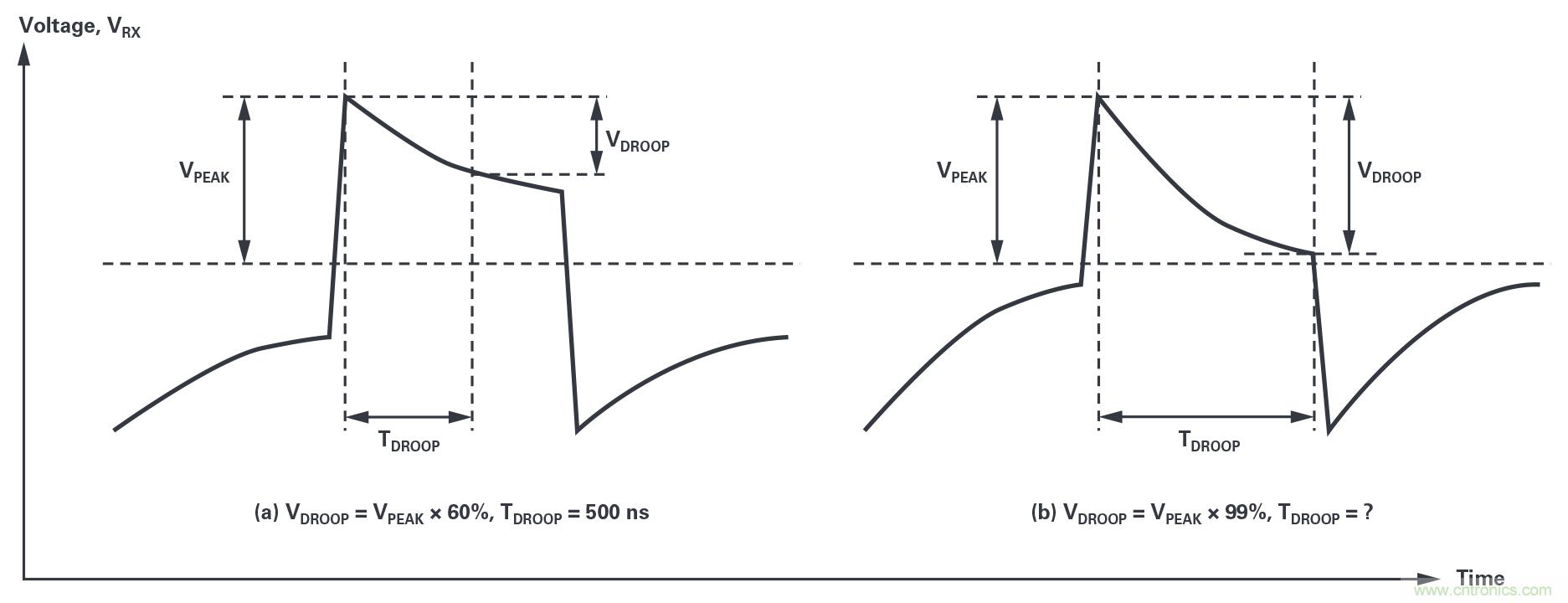
圖6.RS-422接收器的壓降和壓降時間。

圖7.具有MISO 16位突波(所有都處于邏輯高電平)的SPI協議。
無源元件選擇
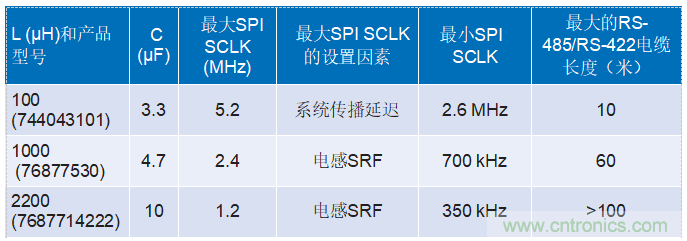
在選擇合適的功率電感時,需要考慮許多參數,包括足夠的電感、額定/飽和電流、自諧振頻率(SRF)、低直流電阻(DCR)和封裝尺寸。表1提供選擇的功率電感和參數。
額定電流需要滿足或超過遠程供電的MEMS傳感器節點的總電流要求,額定飽和電流需要更大。
此電感不會給交流數據造成高于其SRF的高阻抗,在達到某個點之后,會開始呈現電容性阻抗特性。選擇的電感SRF會限制在SPI至RS-485/RS-422物理層上使用的最大SPI SCLK,如圖1所示。在長電纜上使用時,可能不會接觸到SRF電感;例如,電纜超過10米時,可能無法達到11 MHz SPI SCLK速率(產品型號為744043101的SRF)。在其他情況下,在長電纜上運行時,電感SRF可能達到更低的SPI SCLK速率(2.4 MHz、1.2 MHz)。如前所述,在虛假電源濾波器網絡中使用時,電感也會限制可允許的最低SCLK速率。
值更大的電感可以采用12.7 mm × 12.7 mm封裝,值更小的電感可以采用4.8 mm × 4.8 mm封裝。
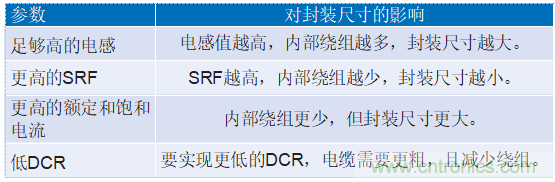
表2顯示在通過權衡這些對立要求,以最小化電感尺寸時,會因為物理限制(內部繞組)等受到限制。
表1.選擇的功率電感參數
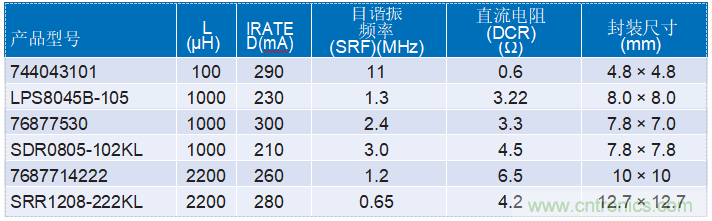
表2.功率電感——對封裝尺寸的限制
選擇合適的直流電壓隔離電容時,受限因素包括瞬態過電壓額定值和直流電壓額定值。直流電壓額定值需要超過最大的總線電壓偏置值,具體如圖3所示。電路或連接器短路時,電感電流會失衡,會被端電極阻抗消耗。出現短路時,需要設置隔直電容的額定值,以實現峰值瞬態電壓。例如,在低功率系統中,電感飽和電流約為1 A時,對應的隔直電容額定值至少為直流50 V。4
系統實現
設計窗口和元件選擇
在RS-485/RS-422長電纜上使用SPI之類的時鐘同步接口,同時在相同的雙絞線(虛假電源)上部署電源和數據時,存在多種設計限制,具體如圖8所示。可允許的最小SPI SCLK由虛假電源濾波器元件設置,即SPI數據線上的高通濾波器數據。最大的SPI SCLK由虛假電源電感自諧振頻率(SRF)或系統傳播延遲設置,以SPI SCLK值更低者為準。
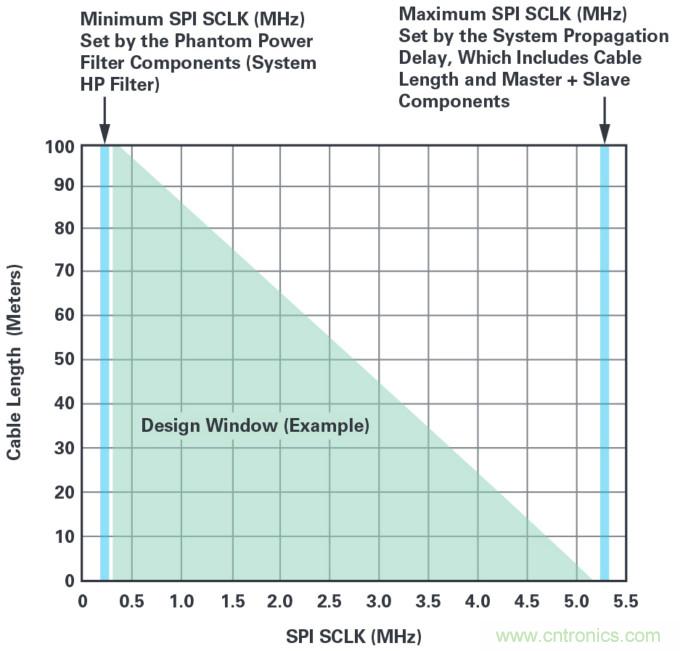
圖8.設計窗口限制。
表3提供建議使用的電感和電容值,對應的最小SPI SCLK通過模擬圖5確定,使用圖6和公式1作為指導。其中,假設VDROOP為VPEAK的99%。最小的SPI SCLK也會考慮最糟糕的場景,如圖7所示,其中所有數據突波位都處于邏輯高電平。對應的電纜長度根據圖2預估。最大SPI SCLK由系統傳播延遲或電感SRF值設置。
下面是一個計算示例。
要確定最大SPI SCLK:
● 指明系統所需的電纜長度。在本例中,我們選擇使用10米長的RS-485/RS-422電纜。
● 使用圖2確定系統可允許的最大SPI SCLK。電纜10米長時,約采用2.6 MHz SPI SCLK。將最大SPI SCLK降低10%,以獲取LC元件容差,從而提供2.3 MHz SPI SCLK。可允許的最大SPI SCLK也可能受選擇的電感的SRF限制。
要確定最小SPI SCLK:
● 考慮SPI協議,其中MISO線路上的所有位都處于邏輯高電平。在本例中,我們選擇使用16位SPI協議,其中會在32 SCLK瞬態期間對16位SPI MISO數據采樣。如果所有16位都處于邏輯高電平,那么有效位的速率為2.3 MHz / 32 = 72 kHz。
● 按照圖5,在VTX上的方波為72 kHz時,可以使用多個L和C值來模擬電纜VRX遠端上的電壓波形。在電纜長度增加時,電感值和電感封裝尺寸會增加。電容值也會增加。
● L和C值的選擇可變,具體由所需的壓降設置決定,如圖6所示。在本例中,假設VDROOP = VPEAK × 99%。
● 在VTX上使用100 µH電感、3.3 µF電容和72 kHz方波時,會產生7 µs TDROOP,其中VDROOP = VPEAK × 99%。
● 6 µs至7 µs TDROOP相當于2.3 MHz至2.6 MHz SPI SCLK。
● 如果選擇100 µH (744043101)電感,2.6 MHz SPI SCLK低于11 MHz電感SRF。
如果使用100 µH電感和3.3 µF電容,可以最大限度減小元件的PCB面積。使用更大的電感時,例如1000 µH或2200 µH,元件的PCB面積可能增大3倍。最大的SPI SCLK理論值由電感SRF設置,這實際上是不可能的,例如,在11 MHz時在沒有時鐘補償的系統中使用100 µH (744043101)。
表3.各種虛假電源濾波器元件
如果使用更大的電感,例如2200 µH,網絡需要更多電容和電阻來衰減系統諧振。額外的元件用藍色表示,在圖9中標記為RDAMP (1 kΩ)和CDAMP (47 µF)。
實驗設置
圖10所示為ADI公司的有線CbM評估平臺,因此被稱為Pioneer 1。此系統使用第一部分所示的SPI至RS-485/RS-422設計解決方案。Pioneer 1也包括ADcmXL3021寬帶寬、低噪聲、三軸MEMS加速度計,將高性能和多種信號處理功能結合到一起,以簡化CbM系統中的智能傳感器節點開發。SPI至RS-485/RS-422從機將ADcmXL3021 SPI輸出通過10米電纜返回到主機控制器,以實施振動數據分析。SPI至RS-485設計使用虛假電源100 µH電感和3.3 µF電容來最小化從機接口解決方案的尺寸,該方案的大小為26 mm × 28 mm(不包括接口連接器)。
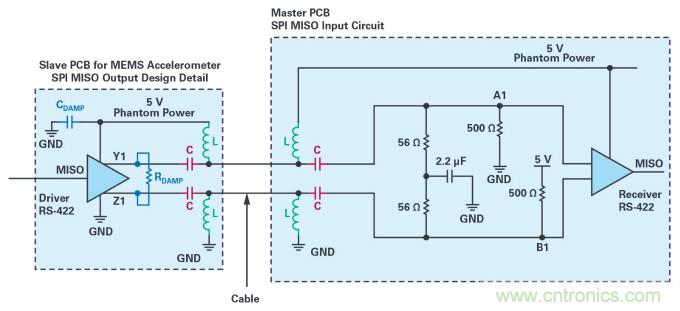
圖9.增加更多系統衰減,以支持更大的電感和電容濾波器。
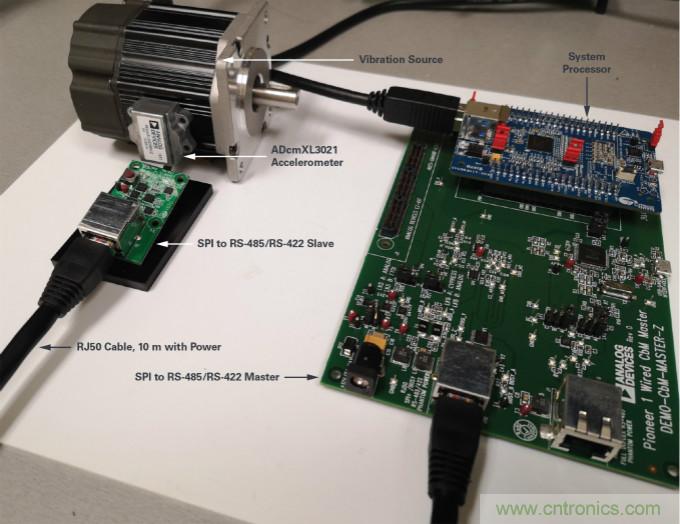
圖10.Pioneer 1基于狀態監控的有線評估系統。
虛假電源線上的交流數據波形
圖11和表4顯示在SPI主機和從機上,以及在RS-485/RS-422差分電壓總線上測量的電壓。這些電壓使用圖10中的示例應用設置測量。模擬信號1(黃色)和2(藍色)是表示MISO信號(紫色)的總線壓差,在SPI從機輸出端測量。數字信號4(黃色)顯示在主機控制器上采樣的MISO。SPI主機上的MISO信號與SPI從機上的MISO的極性和相位匹配,且無傳播延遲。
表4.測量的示波器通道和信號

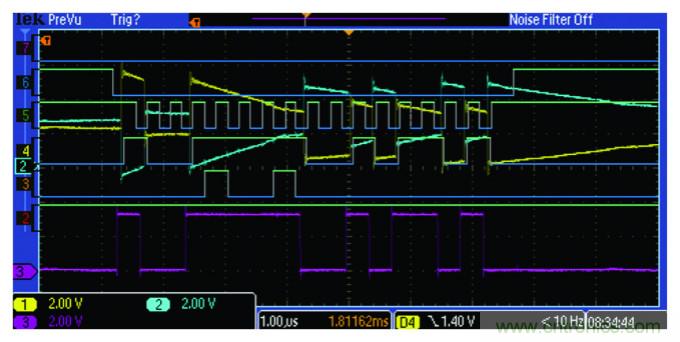
圖11.在SPI主機和從機上,以及在RS-422差分電壓總線上測量的電壓。
虛假電源線上的直流正確性
圖12表示ADcmXL3021正常模式,其中包括SPI協議,該協議在MISO上發送16位數據突波,之后空閑一段時間(最短16 µs),然后再發送另一個16位數據突波。
在虛假電源網絡中,使用100 µH電感和3.3 µF電容:
● 在幀末尾(EOF),RS-485/RS-422總線電壓衰減回到穩定的直流狀態。
● 空閑期直流穩定狀態要求差分電壓RS-422 B-A > 500 mV,用于反映ADcmXL3021 MISO高阻狀態,以及確保ADM4168E收發器輸出上提供邏輯0。如圖4中的濾波器電路所示,如果使用500 Ω電阻,即可確保這個空閑狀態的正確性。
● 下一個幀起始(SOF)將從低電平正確瞬變到高電平,或者保持低電平,具體由ADcmXL3021的MISO數據輸出決定。
● 空閑期RS-485/RS-422總線穩定狀態不與SPI SCLK邊緣對應,所以隨機噪聲不會影響這段時間內的SPI MISO數據采樣。
在虛假電源網絡中,使用1000 µH電感和4.7 µF電容:
uADcmXL3021 MISO輸出之后依次出現EOF、空閑期和SOF,在空閑期,總線電壓電平不會衰減回到500 mV最低直流穩定狀態。可能出現一定的電壓電平衰減,但不會衰減到500 mV。
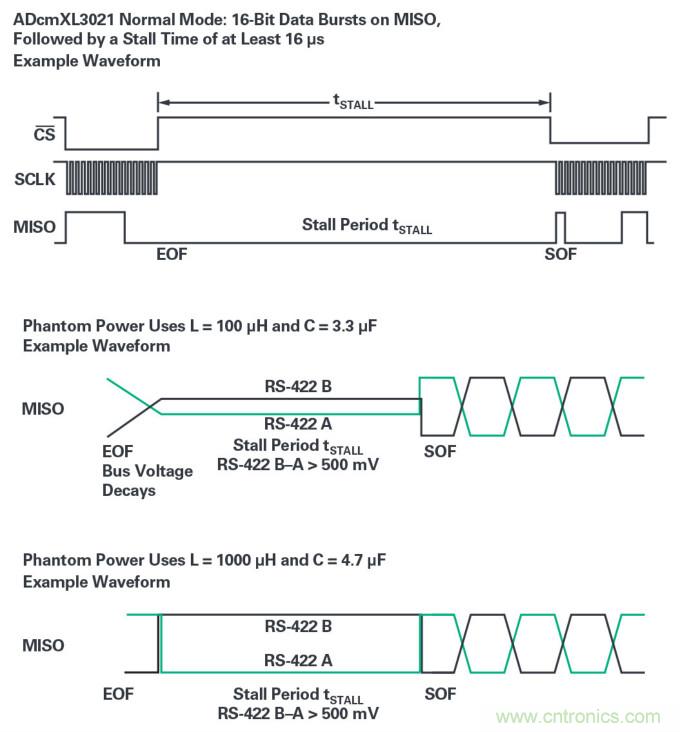
圖12.虛假電源線上的直流正確性。
有線評估解決方案
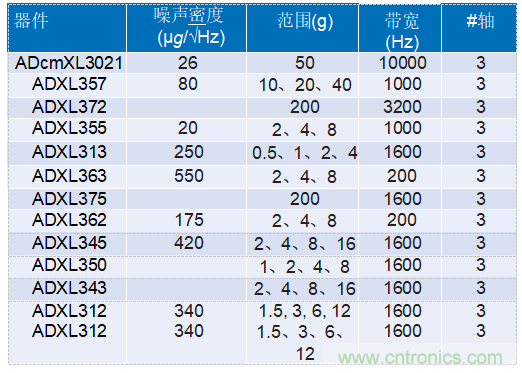
ADI公司開發出Pioneer 1有線系統評估解決方案,以支持ADcmXL3021三軸MEMS加速度計。如維基百科指南所述,Pioneer 1評估套件也可以利用擴展板,支持表5所示的MEMS器件。
表5.適用于MEMS傳感器的有線評估解決方案
參考資料
1 Richard Anslow和Dara O’Sullivan。“為工業4.0啟用可靠的基于狀態的有線監控——第1部分。”ADI公司,2019年7月。
2 “IEEE 802.3bu-2016——IEEE以太網標準——修正案8:單根平衡雙絞線以太網由數據線供電(PoDL)的電線的物理層和管理參數。”IEEE,2017年2月。
3 Andy Gardner。“PoDL:去耦網絡演示。”凌力爾特,2014年5月。
4 Andy Gardner。“PoDL瞬時連接器和電纜短路。”凌力爾特,2014年9月。
作者簡介
Richard Anslow是ADI公司自動化與能源業務部互連運動和機器人團隊的系統應用工程師。他的專長領域是基于狀態的監測和工業通信設計。他擁有愛爾蘭利默里克大學頒發的工程學士學位和工程碩士學位。聯系方式:[email protected]。
Dara O’Sullivan是ADI公司自動化與能源業務部互連運動和機器人團隊的系統應用經理。他的專長領域是工業運動控制應用的功率轉換、控制和監測。Dara擁有愛爾蘭科克大學工程學士、工程碩士和博士學位。自2001年起,Dara便從事研究、咨詢和工業領域的工業與可再生能源應用方面的工作。聯系方式:[email protected]
推薦閱讀:


