

【導讀】環路控制是開關電源設計的一個重要部分。然而,由于各種原因,在選定主要元件后,研究往往在項目結束時被拋到了腦后。通過簡單的試驗和錯誤分析,我們有時候會覺得,如果設計能夠在示波器上實現可接受的瞬態響應,那么該設計便已準備好用于生產,但這種想法非常不明智,而且可能導致高昂代價。這是因為,轉換器中使用的大多數元件都會受到雜散元件的影響,而雜散元件的廣泛影響在原型制作階段是隱藏的。
如果未在模擬和環路測量的基礎上進行徹底分析,您就不會知道相位和增益裕度是什么樣的,以及它們有多可靠。這種設計松散的轉換器很可能在生產中或在現場上電后不久就會出現故障。為避免出現這種情況,本文綜述了目前可供選擇的一些工具,讓您在開始生產之前能夠計算、模擬和測量您的原型,從而確保生產工作安全順利。
I. 簡介
在開關轉換器中,功率級的輸出由電壓變量控制。本文將這類電壓變量記為Verr或Vc,它們由負責將轉換器輸出維持在規定范圍內的補償模塊提供。對于以固定開關頻率Fsw運行的轉換器,控制變量為占空比D。但情況并非總是如此,有些轉換器由可變頻率(例如LLC等諧振轉換器)或者可變導通或關斷時間控制。本文將主要討論以固定開關頻率運行的轉換器類型。
誤差電壓Verr可以直接控制占空比,我們這里討論的是電壓模式控制(VM)或直接占空比控制。另一方面,在電流模式控制(CM)中,控制電壓Vc通過感應電阻按周期固定電感峰值電流,并間接設置工作占空比。然而,當使用示波器顯示在VM或CM下運行的轉換器波形時,您無法判斷轉換器是在電流模式控制還是電壓模式控制下運行。這是因為這兩種結構的功率級非常相似,只有詳細闡述占空比的方式發生了改變:降壓轉換器采用10V電源為負載提供5V電壓時,無論該系統在電壓模式控制還是在電流模式控制下運行,該轉換器在理論上都將具有50%占空比。
作為電源設計人員,我們的目標是構建出穩定的轉換器,既能夠提供精確調節的電壓(或電流),而又對工作條件(輸入源變化、環境溫度變化、不同負載條件等)不敏感。除了這些實踐要求,設計人員還必須確保其轉換器在整個使用壽命期間都能保持穩定和正常運行。您還必須考慮到自然生產誤差或因老化而導致的元件性能下降。現在還不錯的裕度在5年后會變得如何?如果我的買家朋友向我展示工廠選擇的更實惠的新型電容,我對自己的選擇有多大信心?“嗨,Anaximander,如果輸出電容選擇B品牌而不是當前儲存的A品牌,您能確認新一批100萬件適配器會工作正常嗎?”您能大膽地回答這個問題嗎?如果您做足了功課,并仔細研究了寄生電容對交越頻率和相位裕度等的影響,那么您確實可以。但是如果您沒有那樣做,而只是在實驗室內轉動補償器的R和C旋鈕來觀察了階躍響應,那么您可以擦擦額頭上的汗珠,未來幾天您肯定都要加班到很晚來糾正錯誤,避免出現災難性結果。
要避免這種困境,一種方法就是按章辦事,并從功率級響應開始。這是唯一的起點:在考慮可能的控制策略之前,您需要先表征您要控制的系統。您需要的是確定輸出變量對控制輸入的變化有何響應。換言之,您需要待構建降壓或升壓轉換器的控制到輸出傳遞函數:Vout會對Verr中的指定激勵做出怎樣的動態響應(圖 1)。也就是說,設備會做出什么響應?
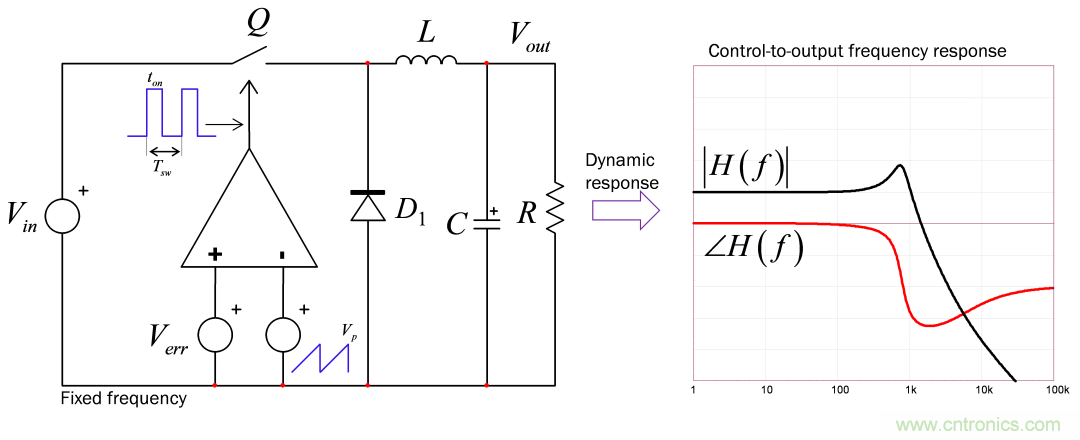
圖 1: 我們想要功率級動態響應。
拿到傳遞函數幅相圖后,您就可以考慮補償策略(即在不同的頻率位置放置極點、零點和增益(或衰減))來滿足您的設計目標。這就是圖 2中所示的示例。D1
構建補償器時,有幾種方法可循,如圖 3所示。經典方法在文獻中存在大量描述,該方法采用運算放大器構建濾波器,因為補償器就是一個有源濾波器。然而,業內主要采用TL431,您可以在當今市場上銷售的絕大多數適配器中發現其痕跡。我承認,就簡單性或成本而言,它是其他方法無法超越的:只需幾美分就可以得到一個具有適度高開環增益(55 dB)和2.5 V精確基準電壓的運算放大器,而且TLV版本的Vref低至1.24 V。該部件提供多種不同的封裝,一些版本可以接受高達36 V的電壓。然而,選擇該器件會帶來與快慢通道相關的其它問題。
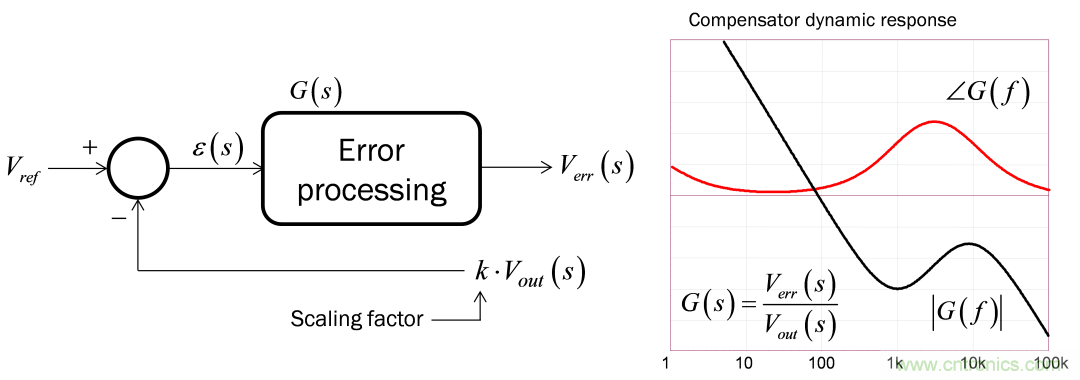
圖 2: 您通過補償器插入極點和零點并形成所需的頻率響應。
此外,還可以選擇使用跨導運算放大器(OTA)來達到補償目的。集成電路設計人員喜歡使用OTA,因為它們占用的硅芯片區域要少于對應的運算放大器。我個人不太喜歡OTA,因為基于運算放大器的補償器提供虛擬接地,而基于OTA的則沒有。此外,電阻分壓比也會影響極點/零點布局。
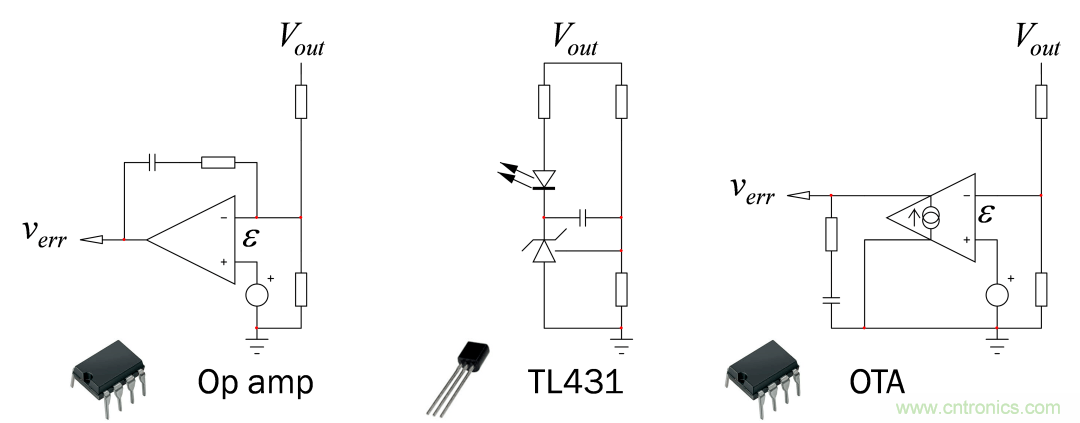
圖 3:設計補償器時有多種有源元件可供選擇。
OTA在功率因數校正(PFC)應用中比較受歡迎,非常適合用于實現具有適度相位邊限提升的補償器。如果您打算將其用于需要實現高相位邊限提升的應用,則可能會達到Vout/Vref比例的上限。
相位邊限提升是為滿足相位裕度目標而需要補償器補償的額外相位量,通常為大于45°的數字。通過圖 4,您會發現功率級在某些選定頻率f1和f2下具有90°或145°的相位滯后。如果使用具有270°固定滯后的標準積分器來閉合環路,則這兩個因素在f1頻率下的滯后之和為-360°或0°:信號在注入點同相返回,并且滿足持續振蕩的條件。這并不是您想要的,除非您的目標就是構建一個振蕩器。現在,如果您在f2頻率下強制交越,則相位裕度為負數,也就是說閉環極點位于右半平面上:系統不穩定。您可以通過在f1或f2頻率處實現相位邊限提升來解決這個問題。通過將極點和零點放在補償器中,您就可以調整其相位響應,使其不再固定為-270°,而是更低的值。當與設備響應相結合時,總參數或相位現在將小于-360°,從而獲得實現穩定所需的相位裕度。
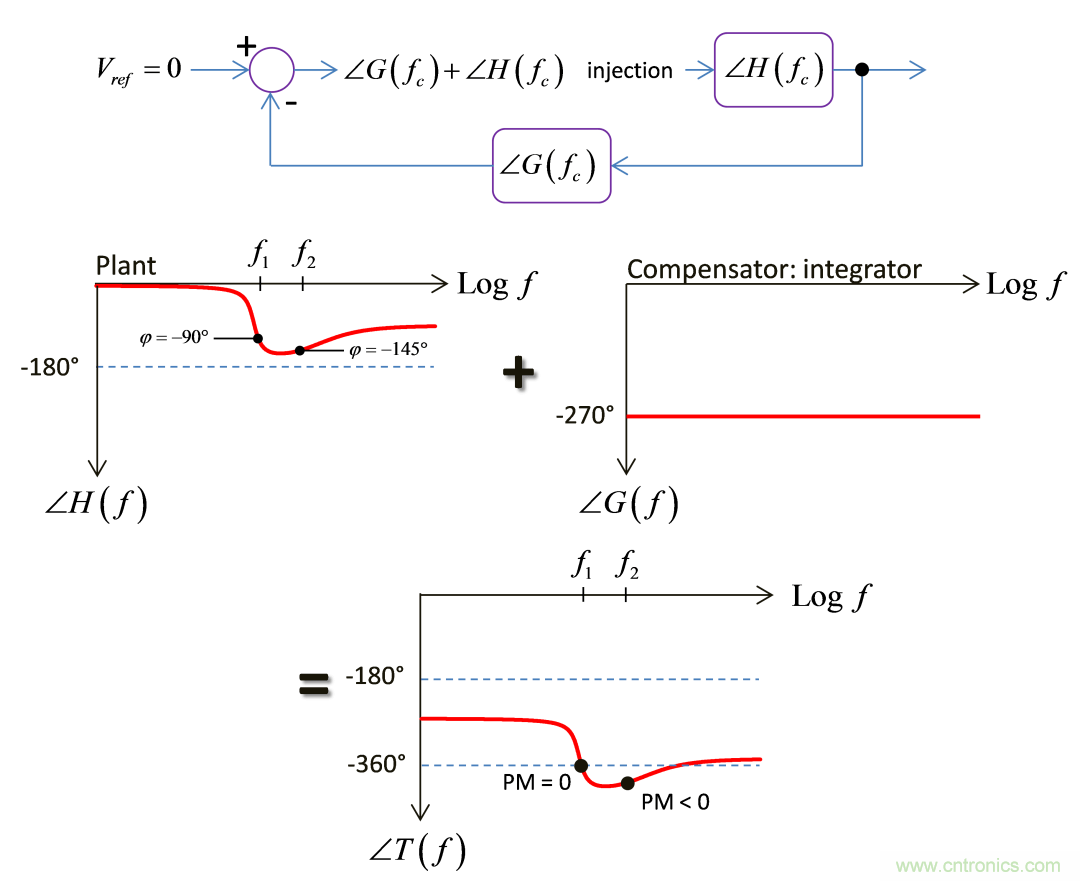
圖 4:設備相位與補償器相位相加應使得總相位滯后低于-360°。
我們可以確定三種類型的補償器,稱為類型1、2和3,如圖5中所示。第1種類型包含原點極點:它是以下傳遞函數所表示的積分器:

無相位邊限提升,并且相位為反相運算放大器結構的相位(-180°)加上原點極點的相位(-90°),因此最終參數為-270°或90°。
第2種類型常見于所需相位邊限提升低于90°的電流模式控制設計。它包含原點極點以及一個極點和一個零點。理論上,原點極點(s=0)可以消除靜態誤差(目標直流電源與環路閉合時的直流電源之間的偏差)。這種極點存在于絕大多數的補償器中,但也有些技術(如所謂的輸出電阻成形)會故意忽略這種極點并接受一點小偏差。
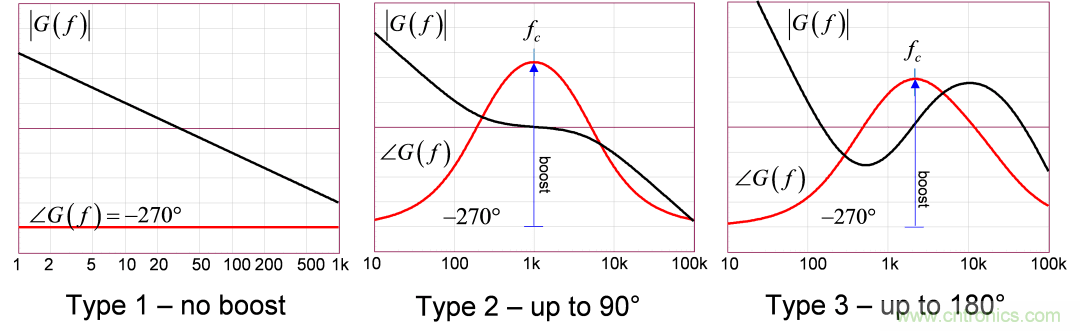
圖5 :您可以使用這三種配置實現補償策略。
在第2種類型中,零點位于極點之前,會使相位隨著頻率升高而增加。極點在稍后出現,然后相位邊限提升返回至零點。通過擴散零點和極點,您可以根據需要調整相位邊限提升,最高可達90°。請注意,如果將極點和零點重合,補償器又會變成第1種類型,相位邊限提升為0°。
該結構中描述的傳遞函數如下所示:
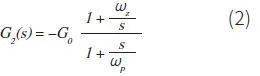
您可以看到,分子中存在反向零點,因此可通過具有增益維度的G0進行因式分解。
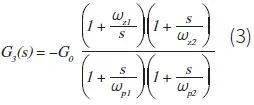
最后,第3種類型的補償器在第2種類型的基礎上增加了另一對極點-零點,并且可將相位提升至最高180°。這可以通過下述表達式進行描述:
如果我們現在對G(s)使用第3種類型的電路,而不是圖4示例中的單純積分器,并將相位提升125°,那么目前的總環路相位會偏離0°或-360°,并且我們會具有70°的裕度(圖 6)。
根據功率級滯后和所需的相位裕度jm,我們可以推導出一個與所需相位邊限提升量相關的公式。我們都知道,反相運算放大器和原點上的極點會導致270°滯后,再加上以選定交越頻率fc表征的功率級相位。這些數字相加,結果應該就與-360°限值相差相位裕量。因此,我們可以這樣寫:
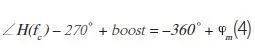
通過求解提升值,我們可以得到:
根據這個數字,我們可以推斷出要使用的補償器類型:
1. 無需提升:第1種類型。適用于不連續傳導模式轉換器,并且從某種程度上說,也適用于PFC級。
2. 最高90°:第2種類型。常用于電流模式控制轉換器(例如,反激和PFC級)。
3. 超過90°但低于180°:第3種類型。通常用于在連續傳導模式(CCM)下運行的電壓模式控制轉換器。
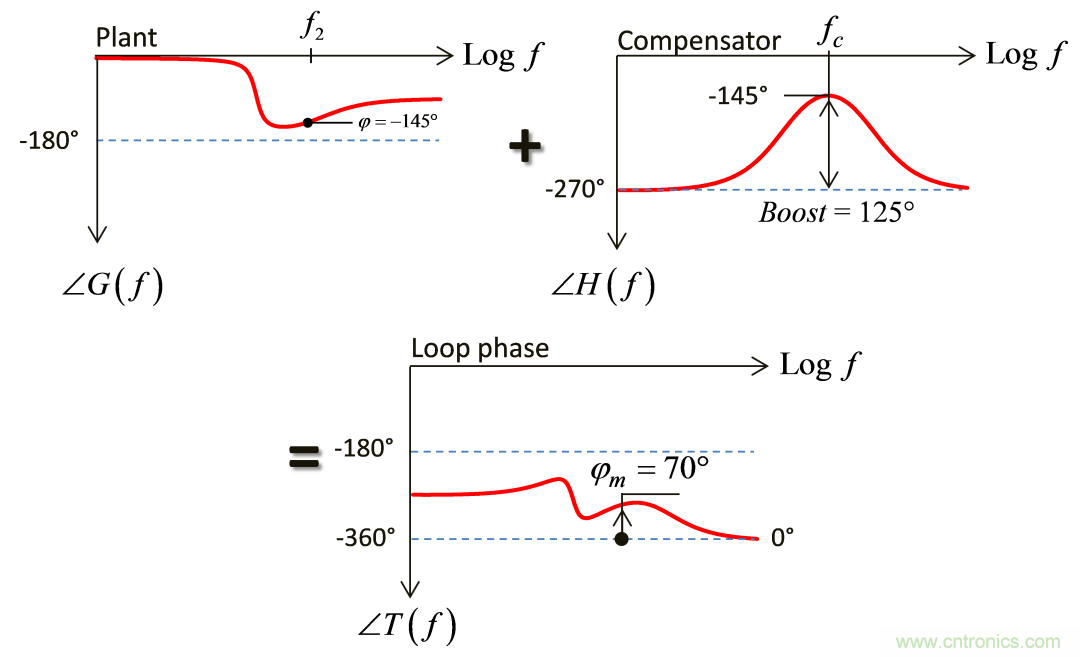
圖 6:相位裕度目前為70°,因此考慮使用第3種類型的補償器。
【編者按】:本文是開關電源設計技術論文《Analysis, Simulation and Experiments Pave the Road to Success》的第一部分,第二和第三部分將陸續在本刊發表,敬請關注。
作者:Christophe Basso
免責聲明:本文為轉載文章,轉載此文目的在于傳遞更多信息,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請聯系小編進行處理。
推薦閱讀:



