

【導讀】從金融、電信、工業、消費到航空航天與國防以及汽車,如今,“同步”這個概念,在所有行業無處不在。眾多應用完全離不開同步;本文將探討其中的部分應用并根據這些示例來分享同步這個概念。
此外,本文的第二部分將研討同步的兩個關鍵技術指標:精度與準確性和集成。 從這兩個指標出發,我將介紹Versal™ 系列之所以成為理想同步平臺的特定功能,幫助讀者以全新、獨到的視角理解這種改變游戲規則的革命性的可編程、自適應平臺。
無處不在的同步
沒有同步,眾多應用根本不可能存在。為什么這么說呢?本段將使用兩個具有代表性的示例來支持這個論斷。
在本文中,術語時鐘 (clock)、時間、鐘表時間 (TOD) 同義。
具體而言,對于同步,時鐘 (clock) 并非周期性的波形(圖 1)。
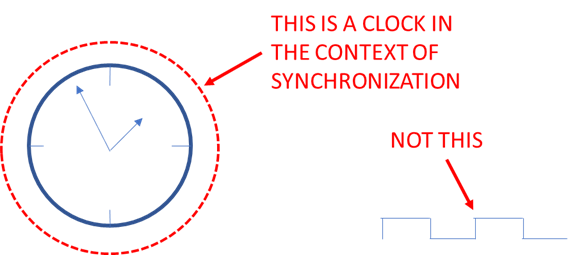
圖 1 - 在同步情景下定義時鐘。
在我們的日常生活中(例 1),我們經常說“明天下午 2點見面”。這個簡單陳述包含眾多關于同步的假設:
● 它假定受邀與會的人有同樣的時間觀念。如果您身處中歐,這句話假定雙方都使用 UTC +1[1]
● UTC時間由位于倫敦的計量實驗室維護,也是世界常規使用的時間。我們的手機運行 UTC 時間的副本并定期在后臺與 UTC 同步,確保二者保持同步。我們的計算機也進行相同的操作[2]。
簡單的一句陳述“我們在下午2 點見”,假定其背后存在復雜的基礎設施,而我們下意識地參考它。
例2 中考慮了一個“顯著”不同的情況:通過 GNSS 進行地理定位[3]。
手機接收來自多個不同衛星的時間(就是時鐘),每個衛星在同一時間發送一個。手機并非與所有衛星距離相等,因此可以測量由不同源發送的時鐘之間的相位差。如果衛星位置先天已知,GNSS接收器就很容易地重新計算自己的位置。
上面這兩個示例有眾多相似性:受邀參會的雙方有相同的時間觀念,就如例 2 中的衛星。此外,雙方和衛星都保持他們/它們參考的公共時間的副本。他們/它們并非直接共享同一個時間源,因為他們/它們在地理位置上彼此遠離。
同步是讓本地時鐘副本(從時間)與公共參考(主時間)隨時間推移保持一致的技術。這就是我們在尋找的定義。
在上面兩個示例中,任何同步誤差都會影響最終應用的性能。在第一個示例中,如果受邀人自己的時鐘慢了(舉例),他在會面時就會遲到。
在第二個示例中,如果衛星的本地時鐘副本有誤差,那么 GNSS 接收器將計算出錯誤的位置。
雖然兩種應用有眾多相似性,但二者之間存在根本的區別,即應用要求的準確性不同。在第一個示例中,如果時鐘慢了 1 秒,沒有人會抱怨,因為延誤 1 秒對會議而言一般可以容忍。而對于 GNSS 接收器,誤差 1 秒將導致計算出錯誤的位置,直接讓應用不具備使用價值。
這就告訴我們,雖然這兩種應用依靠相同的技術(同步),但驗收標準完全不同。事實上,驗收標準只與應用有關。雖然準確性是最重要的驗收標準之一,但絕非唯一的標準。安全性、可用性、精度、集成度等都是其他的驗收標準示例。
在我們繼續研討之前,有必要簡要介紹一下 UTC的背景。UTC使用原子鐘確保時間單位秒得到正確地定義。可以將地球自轉作為一種時間基準,但令人遺憾的是,它的準確度欠佳,因為它逐年發生數秒的變化。在經歷長時間以后,累積的誤差有可能導致 UTC 完全與地球時間不同步。例如在多年后,本該是中午,但 UTC時間是夜晚。為了解決這種潛在的長期失準問題,倫敦計量實驗室通過選擇性地定期增減1 秒,對 UTC進行補償。這一般在每年的 6 月末和 12月末進行。這些校正被稱作閏秒[4]。
全球定位系統 (GPS) 分配的時間使用與 UTC 相同的秒定義,但沒有采用閏秒。因此在 2021 年年初,GPS 時間和 UTC 時間相差 18秒。這個數字在未來還會改變。
作為用戶,我們不必擔心這些校正。我們的手機和計算機將在后臺同步到 UTC,即便存在閏秒,也能保持一致。
為在無數據覆蓋的時間和地點傳播 UTC,UTC 時間也通過德國 DCF77 電臺用長波傳播[5]。
您也許會覺得相當意外,但原子鐘的精度遠優于地球自轉。
Versal中的同步指標
同步這一術語代表的是通用技術,而驗收標準則與應用嚴格相關。在下文中,我將著重介紹 Versal 自適應計算加速平臺 (ACAP) 的兩個具體指標:
● 準確性和精度。
● 集成:應用的范圍一般遠不止于同步。選擇集成所需的所有軟件塊和硬件塊的平臺是正確的做法。
Versal在這兩個指標上都表現優異,我將具體解釋其原因。
準確性與精度
讀者可能想知道的第一個問題是:準確性和精度,它們是不是一回事?
站在測量理論的角度,精度和準確性有不同的意義且彼此獨立。我們現在具體了解。
如果重復測量同一對象得到的結果彼此相近(即使不正確),那么這個測量系統屬于“高精度”。
如果重復測量同一對象得到的結果的平均值正確,這個測量系統屬于“高準確性”。
為更深入地理解上述定義,讀者應考慮圖 2。在該系統中,對象(紅點)的位置在二維空間內,而且我們想要測量它的位置。
我有兩個儀器(藍色和綠色),能測量對象的位置。五個藍點是藍色儀器完成的測量。五個綠點是綠色儀器完成的測量。
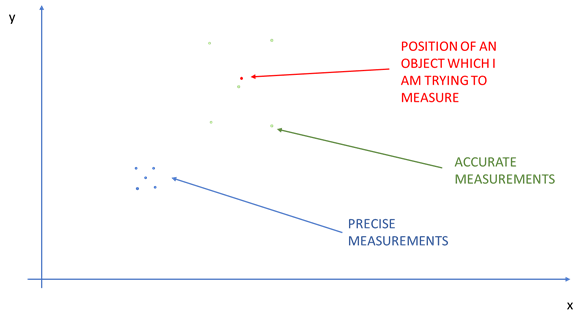
圖 2 - 精度與準確性對比。
根據上述定義,綠色儀器比藍色儀器更準確,藍色儀器比綠色儀器更精確。現在很容易理解準確性和精度是彼此獨立的概念。讀者可以輕松地生成各種測量值集,可以是既不精確也不準確,或者是既精確又準確。
換言之,我們可以看到,只要測量系統是準確的,求平均值就是提高我們對這個對象的位置的認知的良好途徑。
如果測量系統不準確,校準是我們可以考慮的唯一解決方案。
導致時鐘的本地時鐘副本不準確的最主要因素之一是電子電路,特別是收發器的 FIFO:
● 收發器FIFO 的時延在每次啟動時會發生改變
● 收發器FIFO 存在 PVT 相關時延[6]
上述兩個因素需要分開考慮,因為它們對準確性產生影響的方式不同。
第一個因素直接影響準確性:如果接收器和發送器在啟動時時延不同,IEEE1588 機制將無法檢測出這種不同。任何失衡都會直接地影響準確性。甚至求平均值也不能緩解。對于圖 3 所示的這個案例,讀者會注意兩個測量值集存在偏向。
令人驚奇的是,第二個因素對準確性沒有影響。事實上,因環境條件(電壓和溫度)造成的時延變化將同時適用于接收器和發送器,并且 IEEE1588 機制將予以抵消。在我們繼續進行研討前,我認為我們應該更詳細地考慮一下上面這個論述。
這是否暗示時間傳遞只在啟動后進行一次?答案是否。
如果我們只校準一次,盡管 RX 和 TX 之間存在對稱性,但時延的改變仍會引起從時鐘誤差,而且這個誤差將隨著溫度/電源漂移不斷累積。這種情況的對策是以快于溫度/供電變化的速度再同步。
我們回顧一下到目前的內容:影響因素 1 要求我們在啟動時分別了解 RX 和 TX 的時延。影響因素 2 要求我們隨時間推移,用足夠快的速度再同步從時鐘。
Versal 收發器提供不同的替代方法來測量并控制時延,既在啟動時也在運行中,這些方法可分為下列兩種類型:
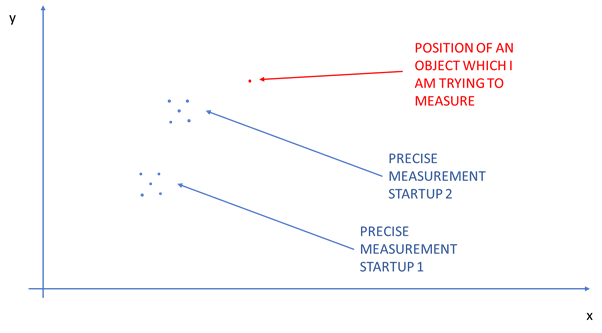
圖 3 - 啟動間的時延變化。
● 緩沖器旁路。
● FIFO 時延測量。
緩沖器旁路允許在 RX 和 TX 方向繞過 FIFO,通過建立精密的時鐘方案,可處理跨時鐘域的數據,且避免時序誤差[7]、[8][i]。毋庸贅述,緩沖器旁路的時延最小。雖然這種“副作用”可能對同步應用無關,但這對高頻交易 (HFT) 等其他行業領域而言則是關鍵。
緩沖器旁路能通過將收發器時延設定成固定值來解決問題,而另一類值得重視的方法是將重點放在時延測量本身。如果任何給定時間點的時延已知,則可以方便地重新用于以數學方式校正鐘表時間 (TOD) 值。
這種方法對同步應用很有意義,因為它不必修改 IP 本身的時鐘架構,就能為所有 IP(首先是以太網)提供自然的升級路徑。
精度同時通過兩類方法實現,因為精度取決于:
● 收發器內置的硬編碼模擬相位檢測器以及
● 用戶控制的模擬相位內插器。用戶可以用皮秒范圍的增量輕松實現時鐘相位的步進或步退。
雖然這看似值得關注,但其準確性如何?失準的典型原因是啟動之間的時延變化,這是分頻器在重置后的隨機相位造成的。
Versal 能夠在啟動時測量或設置時延。這個初始校準階段有助于確保已去除收發器中的所有失準源。
正如我們之前提到的,運行中發生的時延改變對 RX 和 TX 是對稱的,可通過 PTP 機制本身予以補償。我認為對這個最后的論述有必要詳細闡述。如果 PTP 能夠補償這種類型的時延改變,那么隨時間推移時延測量的優勢是什么?
很多情況下,時延的改變在 RX 和 TX 之間并不對稱。讀者可以考慮固有的非對稱協議的情況,例如 PON[9]。
在其他情況下,RX 路徑和 TX 路徑可以在不同物理器件上:在測試設備上是典型情況。不同的器件可能有不同溫度,不同工藝和不同電源。所有這些原因綜合起來,將導致 RX 和 TX 之間的時延會隨時間的推移而演進發展,從而導致失準。
上面的示例,只是用來支持 RX 和 TX 之間的時延并非總是一起變化的觀點。
雖然很多平臺都能正確地實現 PTP 協議,但 Versal 平臺便于您在工作中運用自己的專業知識和思路,打贏這場準確性之戰。這是一款助力您將創意變為現實的標準產品。
從納秒級的典型架構時鐘,到 Versal 內硬編碼的模擬相位內插器提供的皮秒級時鐘,Versal ACAP 在收發器時延控制和時延測量方面,堪稱變革者。
單芯片系統
在之前的部分中,我們已經了解到 Versal 為何在準確性和精度上表現優異,以及開發同步應用時的關鍵因素。
我希望讀者現在把重點放在“同步應用”的含義上:任何運用這項功能在網絡節點間傳遞 TOD 的應用都屬于這個類別。毋庸贅述,這嚴重取決于具體用戶。一般情況下,這需要配備帶有專有軟件、計算邏輯和各種接口的處理器。大多數情況下,它甚至還需要高速 ADC 或 DAC 以及/或者 DSP 引擎。
Versal 是一種自適應計算應用平臺 (ACAP),前文提及的所有構建塊都在單芯片上集成在同一封裝內。
系統架構師和設計師將能夠運用自己的專業知識,在單顆器件上實現自己的應用。這是落實您的構想的最便捷、最快速的途徑。
這只是關于Versal ACAP 的一個不同視角:在單芯片上運行并準確同步完整應用。
結論
本文從兩個角度介紹了同一個具有革命性意義的 Versal 平臺:一個角度從宏觀上了解了運行著配有線接口和無線接口的定制可編程引擎的完整應用。
另一個角度在微觀上揭示出每種接口如何為極準確的時間傳播提供支持。
處于 Versal 平臺的核心的,是構建您自己的應用所需的可編程邏輯。
在單顆器件上準確同步完整應用。
作者簡介
Paolo 是賽靈思首席工程師,負責為歐洲、中東和非洲的戰略客戶提供技術支持。他的主要研究領域包括猝發數據恢復電路、網絡時序同步、超采樣技術和低時延傳輸架構。他是國際時間與同步論壇 (ITSF) 指導委員會委員。
Paolo 從米蘭理工大學微電子專業獲得碩士學位,持有 19 項已授權專利。
[1]協調通用時間 (UTC)。UTC基于世界各地多部原子鐘的平均值。
[2]通過使用網絡時間協議 (NTP)
[3]全球導航衛星系統。最為人熟知的GNSS 示例是美國擁有的GPS。此外,現在還有伽利略(歐盟所有)、格洛納斯(俄羅斯所有)和北斗(中國所有),這只是其中幾個最出名的導航衛星系統。我們手機中的所有現代化 GNSS 接收器都能使用多個 GNSS 系統,以提高運行精度。
[4]進一步了解可參閱https://en.wikipedia.org/wiki/Leap_second。該網頁不僅提供了自 1972 年以來采用的全部閏秒,而且也對這種方法進行了介紹。
[5]進一步了解請參閱: https://en.wikipedia.org/wiki/DCF77
[6]PVT 指功耗、電壓與溫度。
[7]UltraScale 架構 GTY 收發器使用指南
https://www.xilinx.com/support/documentation/user_guides/ug578-ultrascale-gty-transceivers.pdf
[8]“白皮書《賽靈思:實現 PTP 準確性的最佳平臺》https://www.xilinx.com/support/documentation/white_papers/wp524-1588-platform.pdf
[9]進一步了解,請訪問:https://en.wikipedia.org/wiki/Passive_optical_network
免責聲明:本文為轉載文章,轉載此文目的在于傳遞更多信息,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請聯系小編進行處理。
推薦閱讀:



