

- 太陽能自動跟蹤系統的設計
- 跟蹤系統驅動器接口電路
- 步進電機驅動電路
- 限位信號采集電路
太陽能是已知的最原始的能源,它干凈、可再生、豐富,而且分布范圍廣,具有非常廣闊的利用前景。但太陽能利用效率低,這一問題一直影響和阻礙著太陽能技術的普及,如何提高太陽能利用裝置的效率,始終是人們關心的話題,太陽能自動跟蹤系統的設計為解決這一問題提供了新途徑,從而大大提高了太陽能的利用效率。
跟蹤太陽的方法可概括為兩種方式:光電跟蹤和根據視日運動軌跡跟蹤。光電跟蹤是由光電傳感器件根據入射光線的強弱變化產生反饋信號到計算機,計算機運行程序調整采光板的角度實現對太陽的跟蹤。光電跟蹤的優點是靈敏度高,結構設計較為方便;缺點是受天氣的影響很大,如果在稍長時間段里出現烏云遮住太陽的情況,會導致跟蹤裝置無法跟蹤太陽,甚至引起執行機構的誤動作。
而視日運動軌跡跟蹤的優點是能夠全天候實時跟蹤,所以本設計采用視日運動軌跡跟蹤方法和雙軸跟蹤的辦法,利用步進電機雙軸驅動,通過對跟蹤機構進行水平、俯仰兩個自由度的控制,實現對太陽的全天候跟蹤。該系統適用于各種需要跟蹤太陽的裝置。該文主要從硬件和軟件方面分析太陽自動跟蹤系統的設計與實現。
系統總體設計
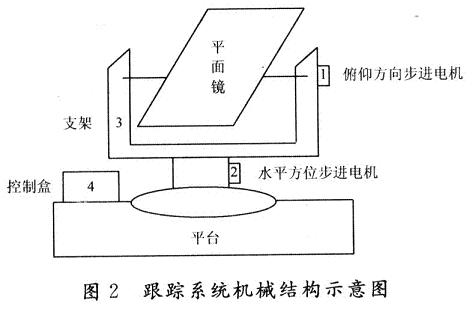
本文介紹的是一種基于單片機控制的雙軸太陽自動跟蹤系統,系統主要由平面鏡反光裝置、調整執行機構、控制電路、方位限位電路等部分組成。跟蹤系統電路控制結構框圖如圖1所示,系統機械結構示意圖如圖2所示。
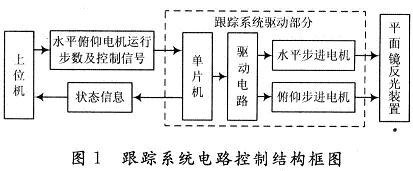
任意時刻太陽的位置可以用太陽視位置精確表示。太陽視位置用太陽高度角和太陽方位角兩個角度作為坐標表示。太陽高度角指從太陽中心直射到當地的光線與當地水平面的夾角。太陽方位角即太陽所在的方位,指太陽光線在地平面上的投影與當地子午線的夾角,可近似地看作是豎立在地面上的直線在陽光下的陰影與正南方的夾角。系統采用水平方位步進電機和俯仰方向步進電機來追蹤太陽的方位角和高度角,從而可以實時精確追蹤太陽的位置。上位機負責任意時刻太陽高度角和方位角的計算,并運用軟件計算出當前狀況下俯仰與水平方向的步進電動機運行的步數,將數據送給跟蹤系統驅動器,單片機接收上位機送來的數據,驅動步進電機的運行。系統具有實現復位、水平方位的調整,俯仰方向的調整,太陽的跟蹤及手動校準等功能。[page]
硬件電路設計
1跟蹤系統驅動器接口電路
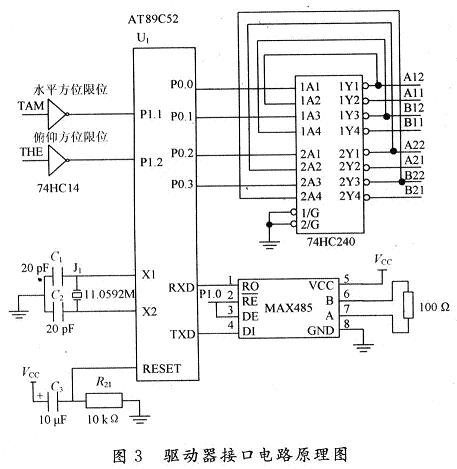
跟蹤系統中微處理器選用89系列性價比高和功耗低的89C52。74HC14芯片是6非門施密特觸發器,與P1.1和P1.2口相連,控制方位限位信號。74HC240芯片,八反相三態緩沖器/線驅動器,用于數據緩沖及總線驅動。系統使用兩片74HC240芯片,通過P0口引腳控制,兩片74HC240的16個輸出引腳作為步進電機驅動電路的輸入控制信號,分別控制步進電機俯仰方向和水平方位的正反轉。系統與上位機的通信選用MAX485接口芯片,由P1.0口控制其收發狀態。驅動器接口電路如圖3所示。
2步進電機驅動電路
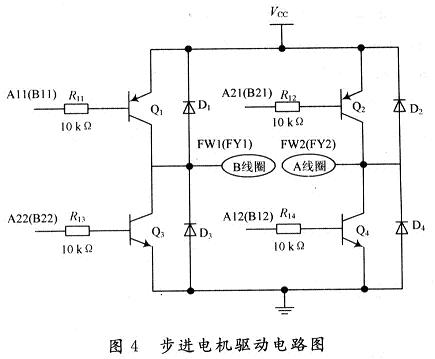
步進電動機是一種用電脈沖信號進行控制,并將電脈沖信號轉換成相應角位移的執行器。在跟蹤系統中,以74HC240的16個輸出信號作為步進電機驅動器的輸入控制信號,用以控制步進電機俯仰方向和水平方位的正反轉。圖4所示的是步進電機一路驅動電路圖,系統共有四路驅動電路,分別驅動步進電機俯仰方向和水平方位的正反轉。
其中,水平方位電機由D7,D6,D5,D4驅動;俯仰方向電機由D3,D2,D1,D0驅動。跟蹤裝置中步進電機選用42BYG250C型,步矩角1.8°。水平俯仰方向步進電機運行的最大角度是360°,共需運行20000步。減速器的傳動比為1:100,即電機轉動100°時水平轉臺相應轉動1°。以步進電機1.8°的步距角計算,當鏡面裝置的水平轉臺轉動1°時,步進電機發出100/1.8個脈沖,由此可以計算平面鏡法向量的方位角為a時步進電機發出的脈沖數為100α/1.8個。步進電機動作頻率可手動設置,默認情況下,步進電機每隔15s動作一次。[page]
3限位信號采集電路
采用光電耦合器與電壓比較器電路組成的微機步進電機限位電路,其電路圖如圖5所示。
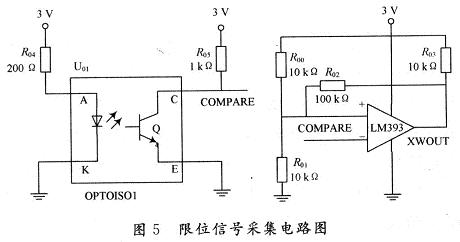
限位電路中利用雙三態門來控制步進電機的脈沖通路。工作原理是:在到達限位位置之前,光耦導通,電壓比較器LM393的反向輸入端有信號,允許步進電機控制脈沖從此通過。當限位桿到達限位位置時,擋住了光耦的光通路,使LM393的反向輸入端無信號,步進電機就停止。
軟件設計
太陽自動跟蹤系統的軟件分為兩部分,一是步進電機控制部分,主要由單片機完成。單片機的軟件設計采用模塊化設計的方法,主要分為如下幾個軟件模塊:主程序模塊、串行口中斷處理模塊、正常跟蹤處理模塊、串行口中斷復位處理模塊等。單片機主程序流程圖如圖6所示。
 [page]
[page]軟件的另一部分為PC機部分,PC機軟件部分主要是負責任意時刻太陽位置的計算并運用軟件計算出當前狀況下俯仰與水平方向步進電機運行的步數,并將數據送給跟蹤系統驅動器。與單片機通信的部分使用VC++中的MSComm控件來編譯串口通訊的應用程序,采用MSComm32.OCX控件。使用控件的屬性進行串口設置,使用控件的事件驅動進行串口響應,使用控件的方法完成串行口接收和發送數據。PC機通信流程圖如圖7所示。
上位機控制系統具有實現復位、水平方位的調整,俯仰方向的調整,太陽位置的跟蹤、手動校準及計算當日數據等功能。其中“設置”按鈕,可進行地方經緯度、波特率、步進電機動作頻率等的設置。上位機可執行程序控制界面如圖8所示,圖9所示的是控制主界面下“設置”按鈕的對話框。
試驗觀察數據分析
由于影響跟蹤精度的因素很多,不僅跟當地緯度、太陽赤緯角、太陽時角的取值有關,還跟步進電機的精度以及跟蹤轉臺的機械結構有關,因而需要對跟蹤軌跡的程序進行校正。校正采用手動操作,通過控制水平俯仰方位步進電機,使兩個軸帶動平面鏡反光裝置轉動,同時不斷觀察平面鏡反射太陽光的影子,當影子中心剛好聚在指定點時為最佳,記錄下從原點到該點兩軸的步進電機各自走過的步數,根據實際運行步數與理論運行步數之差,可計算得到角度之差,就是高度角和方位角的修正值。校正可以選擇任一天中幾個不同時刻進行。系統在實際運行時,觀察到太陽在正午至下午3點期間,高度角方位角變化曲線存在明顯拐點,變化比較顯著,在此期間內系統對太陽位置的跟蹤存在誤差。
表1中列出了2009年1月12日中午至下午三時左右的理論數據,并用系統的手動校準功能,記錄下不同時刻的步進電機實際運行步數。
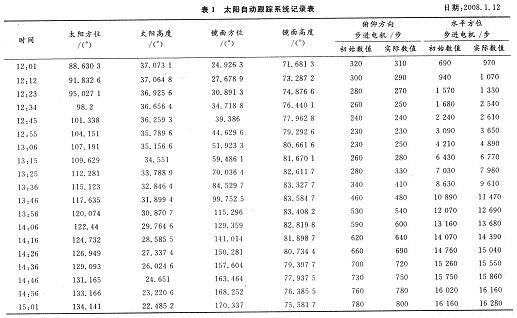
為了更準確地得到太陽實際位置的參數修正值,應在春夏秋冬四季中不同時刻分別觀測記錄數據,將得到的一組高度角和方位角的校正值,擬合其曲線。用校正系數校正理論值存入控制程序,可以提高跟蹤精度。
本文介紹的太陽自動跟蹤裝置可以有效地提高太陽能利用率,適用于各種需要跟蹤太陽的裝置。經過試驗、測試和實際使用,各項指標均達到了設計要求。本文設計的太陽自動跟蹤裝置是基于視日運動規律,為使系統具有更高的跟蹤精度,可采用光電傳感器跟蹤校正,構成由視日運動規律跟蹤和傳感器跟蹤的混合跟蹤系統。隨著太陽能自動跟蹤裝置的廣泛應用,它定會有助于提高綠色能源利用的進程,為環境保護和提高人民的生活質量做出更大的貢獻。




