

【導讀】大家對數據采集模式都有一定的了解,但是你知道什么才是正確的數據采集模式嗎?你知道如何使用數據采集模式嗎?還不知道?你OUT了!本文將為你一一解答什么才是正確的數據采集模式。
模塊化數字轉換器具有許多采集功能,你可以用這些采集功能從多個通道采集數據,然后傳送給計算機進行處理。這些采集模式能讓你高效地使用板載內存,減少兩次采集之間的死區時間。模塊化數字轉換器經常用于采集來自低占空比信號的數據,例如回波測距(包括雷達、聲納、激光雷達和超聲波),以及瞬態數據采集應用(如飛行時間光譜測定和其它基于激勵-響應的分析)。
數字轉換器通常具有兩種使用方式不同的工作模式。標準模式使用采集內存作為環形緩沖器,就像示波器一樣。數據被寫入數字轉換器的環形內存中,直到觸發事件發生。經過觸發之后,觸發后的值被記錄下來。這將導致記錄的數據中同時包含觸發前和觸發后的值。這種工作模式主要是與數字轉換器的相關數據采集軟件一起使用。該軟件可以用于查看、記錄和處理采集的信號,驗證數字轉換器的設置,并對數據做初步處理。
另外一種模式是先進先出(FIFO)模式,這是一種流模式,是為數字轉換器和外部主機之間連續傳輸數據設計的。本文中提到的數字轉換器Spectrum M4i.4451-x8采用了PCI Express x8 Gen2接口,流速高達3.4GB/s。數據流的控制是驅動器根據中斷請求自動進行的。完整安裝的采集內存用作數據流的緩沖器。
多段記錄模式
不管標準模式還是FIFO模式都提供了三種多段記錄方法,這些方法可以在低占空比的測量應用中更加高效地使用采集內存。低占空比應用包括了持續時間短的感興趣事件跟上長時間靜默間隔的那些應用。針對采集這類信號優化了的采集方法有多段記錄模式、門控模式和ABA(雙時基) 采集模式。所有這些模式都會將內存分段,然后在內存中進行多次采集。雙時基ABA模式可以縮短兩次觸發之間的采樣率,從而節省內存空間,同時仍能用于查看兩次觸發之間的死區時間內發生的事件。下面讓我們看看這些采集模式是如何工作的。圖1對數字轉換器的工作原理做了一些總結。
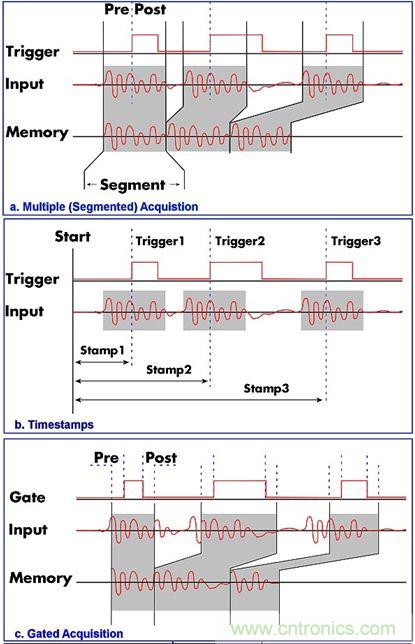
圖1:多段、門控和ABA采集模式和相關時間戳的概要視圖。
多段記錄(分段)模式(圖1a)允許以特別短的重新加載時間記錄多個觸發事件。采集內存被分成尺寸相同的多個段。每個觸發事件填裝一段,采集過程在兩段之間停止。用戶可以編程段內的觸發前和觸發后間隔。采集段的數量僅限于所用的內存容量,當使用FIFO模式時是沒有限制的。與多次觸發相關的重要數據存儲在采集內存的連續段內。與事件之間的死區時間相關的數據是不記錄的。每個觸發事件被打上時間戳,因此每次觸發的精確位置是知道的。圖1b以圖形化的方式顯示了多段記錄模式下的時間戳工作過程。門控采集(圖1c)模式使用門控(使能)信號的狀態(可以是另外一個通道或外部觸發輸入)啟動或停止采樣過程。只有當門處于激活狀態時才將數據寫入內存。就像在多段記錄模式中一樣,用戶可以編程有關門的觸發前后的時間間隔。在門控模式中,時間戳標志了不包含門控采集前后間隔的門的開閉。采集的門段數量受限于采集內存,并且在使用FIFO模式時僅受主機內存的限制。
圖1d所示的ABA模式是一種雙時基采集,結合了對觸發事件的快速采集(B時基)和觸發之間的緩慢采樣速率(A時基)。ABA模式工作時就像整合了一個快速數字轉換器的慢速數據記錄器。觸發事件的實際位置與多段記錄模式中一樣用時間戳進行標志。
多段記錄和門控采集模式具有以下一些優點:
1、采集內存分段后,由于只在信號激活時以全速采樣率記錄數據,因此可以更高效地使用內存。
2、只存儲重要的測量事件、并且不涉及‘死區’時間,因此需要傳送的數據較少,可以實現對分段信號的連續數據采集和處理。
3、在多段和門控模式中重新加載或觸發“死區時間”的次數減少了。在本例中使用的Spectrum M4i數字轉換器的重新加載時間是40個樣本(+編程的預觸發)。在最高采樣速率時的重新加載時間短至80ns。短的觸發重新加載時間意味著即使在高事件速率的應用中也能減少事件遺漏的機會。
4、每個觸發事件的時間戳允許你讀取事件之間的時間差。當事件呈現信號中的異常時
,
所有段可以同時查看,各個段可以分別縮放以顯示每次采集中的詳細內容。
ABA模式使用低采樣率查看觸發之間的信號,同時用較高的采樣率顯示觸發端具有較高時間分辨率的信號分量。這種方法的內存使用效率沒有多段記錄或門控模式高,但可以用來連續地查看兩次觸發之間發生的事件。使用時間戳時,快慢數據與1個樣本的分辨率是同步的。
[page]
應用例子
第一個例子(圖2)顯示了對超聲波測距儀的聲音輸出進行的多段記錄模式采集。這個設備輸出40kHz脈沖信號,然后根據接收到回波所花的時間確定距離。這些脈沖以5個一組的方式產生,間隔為15μs,處理工作是在這些多個脈沖串之間的450ms“死區時間”內進行的的。聲音信號采用帶寬為100kHz的儀器級麥克風拾取。圖2的左邊顯示了采集信號的一些參數設置。
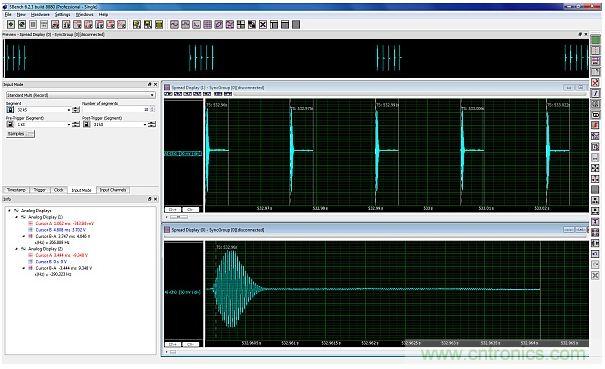
圖2:用多段模式采集超聲波測距儀的40kHz聲音輸出。
每個段包含32k樣本,其中1k是觸發前樣本,31k是觸發后樣本的記錄。圖中沒有顯示出來的采樣率是7.8MS樣本/秒。最上面的軌跡是對整個采集過程的預覽,顯示了多個脈沖串和處理間隔。中間的軌跡是對5個段的放大顯示圖。每個段的開始用時間戳進行了標記。最下面的軌跡是采集過程中第一個脈沖的放大顯示圖。從這張圖可以看到單個脈沖的細節。顯示這些數據的軟件可以表明段是連續的,因為它們確實存儲在內存中,但整合了測量間距的視圖通常更加有用。通過只存儲與每次觸發相關的段,數字轉換器可以刪除3.5M個以上的數據樣本,而這些樣本本來是要在記錄死區時間的每個實例中消耗掉的。
如果兩個采集段之間的數據比較重要,那就應該采用ABA模式,如圖3所示。在這種模式下,數據使用兩種不同的采樣率進行記錄。ABA模式從每個輸入端產生兩個數據通道。主數據通道被稱為“B”通道,采用多段記錄采集模式,針對檢測到的每次觸發記錄一段數據。B通道數據采集采用選定的采樣率。每二個數據通道被稱為“A”數據通道,采用分頻的采樣時鐘連續運行,用于采集較慢的連續信號。A、B數據間的時間同步是基于采集到的時間戳完成的。結果顯示在整個運行時間內用較慢的A采樣時鐘實現了完整的信號采集,同時在每次觸發事件點會產生以較高速率采樣的B段數據,并且對感興趣的區域提供了更多的信息。
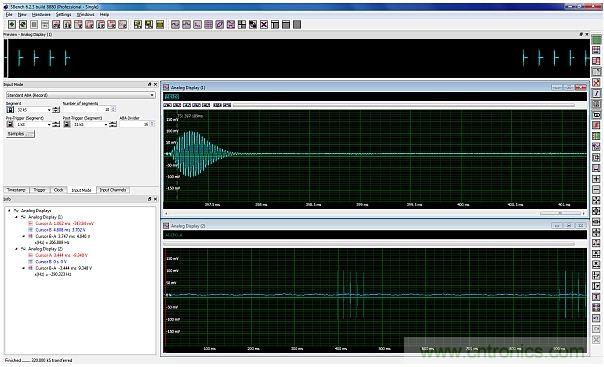
圖3:使用雙時基ABA采集模式采集的同一超聲波脈沖。注意,下方的“A”軌跡是以較低采樣率采集的連續信號數據,上方的軌跡是以較高(B時基)采樣率采集的單個段。
圖3的最上方是整個采集的完整預覽。中間是以選定的采樣率(B采樣時鐘)記錄的單個數據段。時間戳顯示了觸發時間。最下方的軌跡是以選定采樣率的1/16采樣的連續“A”數據。注意,連續記錄顯示了在使用多段記錄模式的圖2中不是很明顯的脈沖間信息。最后一個例子顯示了門控采集模式。這種模式允許由外部門控信號代替傳統觸發信號來控制數據的記錄。如果門控信號滿足觸發閾值設置,數據就被記錄。因為門的寬度可能不完全匹配信號持續時間,用戶設定的前后門控區域可以被增加和采集。門控段的數量僅限于可用的采集內存,當使用FIFO模式時是不受限制的。
圖4提供了一個使用模擬激光信號完成的門控采集例子。門控信號標志待觸發的激光。門控信號被施加于數字轉換器的第二個通道,并且這個通道被設為觸發源。觸發閾值電平被設為150mV。最終采集到的是顯示屏上的激光脈沖和門控信號。注意,128個樣本的前后區域給門控區域增加了額外的樣本。正如前面的例子一樣,最上邊的軌跡是預覽模式,顯示了速率為10Hz的多個激勵。當使用門控采集模式時,時間戳與門的開始和停止邊沿相關,這可以在段的縮放窗口看出來。段的持續時間等于門控時間加上前后門控區域的128個樣本。
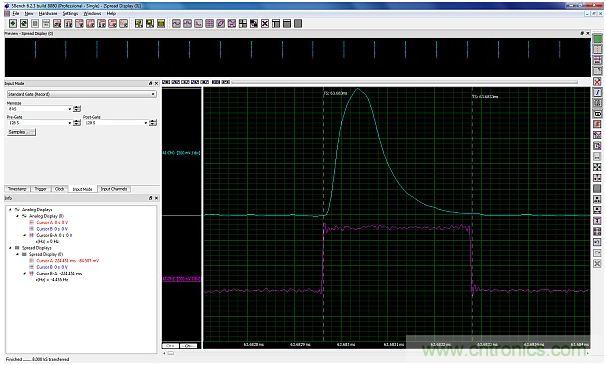
圖4:門控模式采集模擬激光脈沖的例子,該例子表明在第二個數字轉換通道上的門控信號觸發了采集的啟動和停止,它同樣包含128個樣本的前后門控區域。
使用門控采集模式后,只需8kS的采集內存就可以采集18個脈沖(總的持續時間等于1.8秒)。總結
本文詳細介紹了特殊的數據采集模式:多段記錄、門控采集和ABA。其中ABA可以減少采集和分析低占空比信號所需的內存,提高采集的效率。智能采集模式有助于確保重要的事件不會被遺漏。快速觸發重新加載時間和優化后的采集效率可以幫助你采集復雜的脈沖信號,即使它們以很高的事件速率產生。相信經過小編的講解,大家能夠對數據采集模式有一定的了解和研究。
相關閱讀:
設計分享:基于STM32F101數據采集器的設計方案
多路復用數據采集系統需考慮些什么?
數據采集系統中濾波器的選擇




