

【導讀】本文主要講解了高分辨率壓電陶瓷D/A電路設計,根據壓電陶瓷微位移器對驅動電源的需求,設計了壓電驅動電源系統的方案。該設計分為數字電路部分以及模擬電路部分。經分析改進驅動電源的精度和穩定性后,能夠實現高分辨率微位移定位系統對靜態定位控制的需求。
該方案先介紹了電源系統中的數字電路部分和模擬電路部分,并對驅動電源的精度與穩定性進行了分析與改進。最后對驅動電源的性能進行了實驗驗證。實驗結果表明:該設計方案的電源輸出電壓噪聲低于0.43 mV、輸出最大非線性誤差低于0.024%、分辨率可達1.44 mV,能夠滿足高分辨率微位移定位系統中靜態定位控制的需求。
壓電陶瓷驅動器(PZT)是微位移平臺的核心,其主要原理是利用壓電陶瓷的逆壓電效應產生形變,從而驅動執行元件發生微位移。壓電陶瓷驅動器具有分辨率高、響應頻率快、推力大和體積小等優點,在航空航天、機器人、微機電系統、精密加工以及生物工程等領域中得到了廣泛的應用。然而壓電陶瓷驅動器的應用離不開性能良好的壓電陶瓷驅動電源。要實現納米級定位的應用,壓電陶瓷驅動電源的輸出電壓需要在一定范圍內連續可調,同電壓分辨率需要達到毫伏級。因此壓電陶瓷驅動電源技術已成為壓電微位移平臺中的關鍵技術。
D/A 電路設計
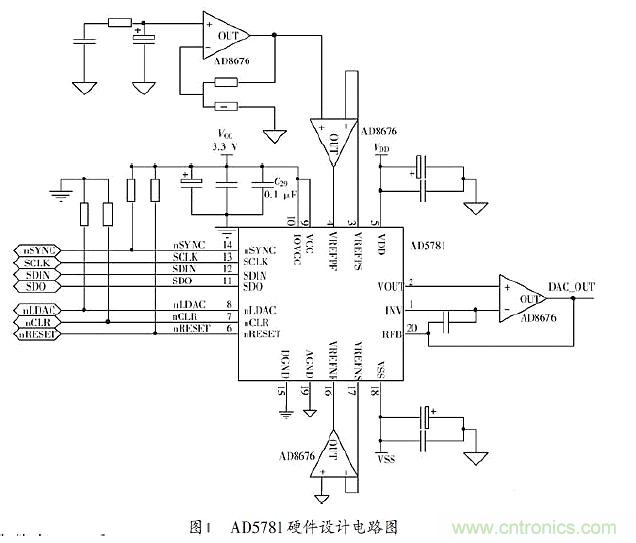
由于壓電驅動電源要求輸出電壓范圍為0~100 V,分辨率達到毫伏級,所以D/A 的分辨率需達到亞毫伏級。本設計采用AD5781作為D/A 器件。AD5781是一款SPI 接口的18位高精度轉換器, 輸出電壓范圍-10~10 V,提供±0.5 LSB INL,±0.5 LSB DNL 和7.5 nV/Hz 噪聲頻譜密度。另外,AD5781 還具有極低的溫漂(0.05 ppm/℃)特性。因此,該D/A 轉換器芯片特別適合于精密模擬數據的獲取與控制。D/A 電路設計如圖1所示。
[page]
線性放大電路設計
從工程角度考慮,由于干擾源的存在,會使系統的穩定性發生變化,導致系統發生震蕩。因此保證控制系統具有一定的抗干擾性的方法是使系統具有一定的穩定裕度即相角裕度。由于實際電路中存在雜散電容,其中放大器反向輸入端的對地電容對系統的穩定性有較大的影響。如圖6所示,采用C5和C6補償反向端的雜散電容。從系統函數的角度看,即構成超前校正,增加開環系統的開環截止頻率,從事增加系統帶寬提高響應速度。PA78有兩對相位補償引腳,通過外部的RC 網絡對放大器內部的零極點進行補償。通過PA78的數據表可知,PA78內部的零極點位于高頻段。根據控制系統抗噪聲能力的需求,配置RC 網絡使高頻段的幅值特性曲線迅速衰減,從而提高系統的抗干擾能力。圖中,R4,C1與R5,C2構成RC 補償網絡。
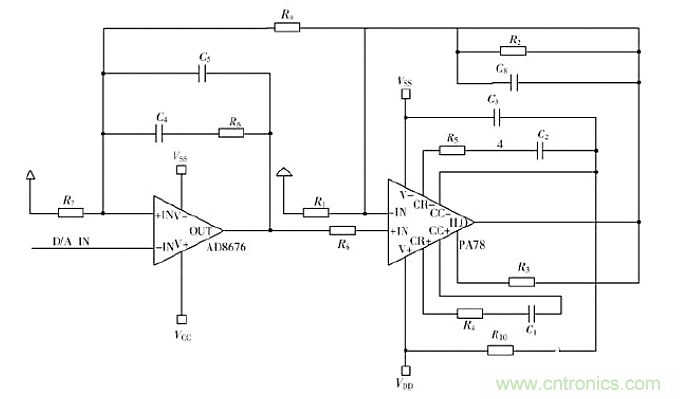
圖2
相關閱讀:
案例曝光:解析LED球燈泡的驅動電源
逆天設計:看手機充電器是咋被整成LED驅動電源?
獨家揭秘:原邊控制帶TRIAC調光的LED驅動電源設計



