

【導讀】網友有福啦!這里分享的是一個由一個電動玩具車改造而成的簡易智能電動車的詳細設計過程,設計主要包括基本要求,發揮部分及其它創新部分。同時每一部分的電路設計,都給出了不同的設計方案,包準樂到你眼淚汪汪。
本系統要求設計并制作一個簡易智能電動車,設計方案包括基本要求,發揮部分及其它創新部分。
基本要求
① 電動車從起跑線出發(車體不得超過起跑線)、沿寬度為2cm的黑色引導線到達B點。
在“直道區”鋪設的白紙下沿引導線埋有1~3塊寬度為15cm、長度不等的薄鐵片。電動車檢測到薄鐵片時,立即發出聲光指示信息,并實時存儲、顯示在“直道區”檢測到的薄鐵片數目。
在“直道區”鋪設的白紙下沿引導線埋有1~3塊寬度為15cm、長度不等的薄鐵片。電動車檢測到薄鐵片時,立即發出聲光指示信息,并實時存儲、顯示在“直道區”檢測到的薄鐵片數目。
② 電動車到達B點后進入“彎道區”,沿圓弧引導線到達C點(也可脫離圓弧引導線到達C點)。
C點下埋有邊長為15cm的正方形薄鐵片,要求電動車到達C點檢測到薄鐵片后在C處停車5秒,停車期間發出斷續的聲光信息。
C點下埋有邊長為15cm的正方形薄鐵片,要求電動車到達C點檢測到薄鐵片后在C處停車5秒,停車期間發出斷續的聲光信息。
③ 電動車在光源的引導下,通過障礙區進入停車區并到達車庫。電動車必須在兩個障礙物之間通過且不得與其接觸。
④ 電動車完成上述任務后立即停車,全程不得超過90秒,行駛時間達到90秒時立即自動停車。
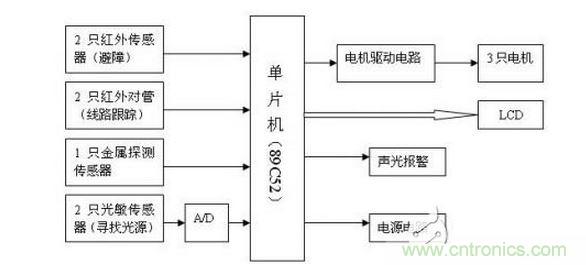
圖2 系統總體框圖
[page]
線路跟蹤電路
方案一:采用CCD單色攝像頭,配計算機主板及圖像采集卡。對白背景下,黑線的識別,目前做的比較成熟,效果相當好。但成本高,很難找到合適的載體。
方案二:采用顏色傳感器。目前顏色傳感器的應用,越來越廣泛,效果也可以。但幾百元的價格及相對復雜的處理電路,并且還需要光源,所以也不是一個很好的選擇。
方案三:采用一左一右兩個紅外發射接收對管。該傳感器不但價格便宜,容易購買,而且處理電路(如圖3所示),簡單易行,實際使用效果很好,能很順利地引導小車到達C點。
在該電路中,加比較器LM311的目的,是使模擬量轉化為開關量,便于處理。為使發射有一定的功率,發射回路要求不小于20mA的電流。
根據 ,故可選擇R1=150Ω。
啟動時,小車跨騎在黑線上。兩個紅外發射接收對管,分別安裝在黑線的兩側的白色區域,輸出為低電壓,當走偏,位于黑線上時,輸出為高電壓。因黑線較窄(2cm),為及時調整車的方向,選擇比較器的閥值為2.5v,即黑白相間的位置,即開始調整。實驗表明,效果較理想
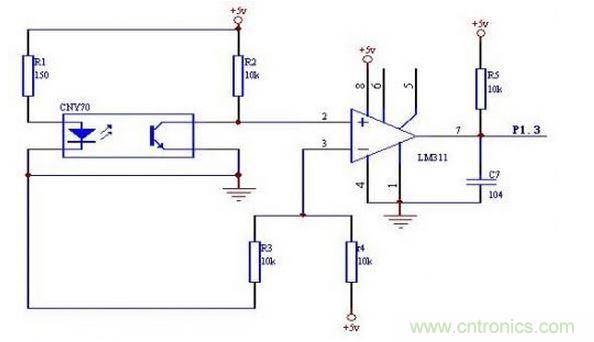
圖3 紅外發射接收對管處理電路
避障電路
方案一:采用激光傳感器測距。能非常準確地測出小車與障礙物的距離,但價格也高,處理復雜,不符合我們的要求。
方案二:采用超聲傳感器。進口的超聲傳感器,換能器薄,并且帶處理電路,輸出與距離成比例的模擬信號,通過AD轉換,可獲得距離信息,價格貴。也有一些較簡單的超聲傳感器及處理電路,能輸出開關量信息,價格也不貴,是一個好的選擇,但由于沒買到現成的處理電路,平常又沒有做過這種電路,時間緊,故未采用。
方案三:采用左右兩個紅外傳感器。紅外傳感器,是目前使用比較普遍的一種避障傳感器,其處理電路如圖4所示,通過調節R23、R24兩個電位器,可調節兩個紅外傳感器的檢測距離為10—80cm,開關量輸出(TTL電平),簡單、可靠。我們采用這種電路,能可靠地檢測左前方、右前方、前方的障礙情況,為成功避障提供了保證。
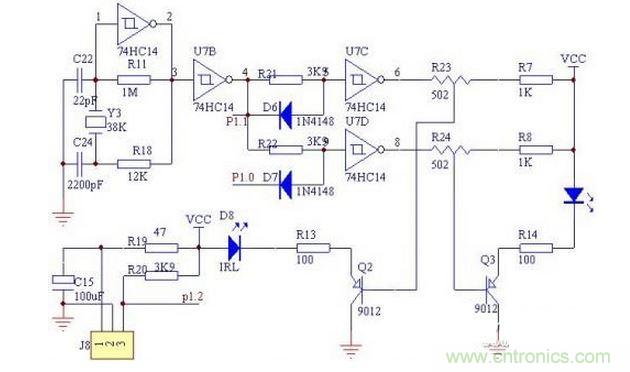
圖4 紅外發射及接收處理電路
[page]
光源檢測電路
為了檢測光線的強弱,我們在小車左前方、右前方加了2只光敏傳感器,即光敏電阻。電路如圖5所示。光敏傳感器根據照射在它上面的光線的強弱,阻值發生變化,輸出電壓隨之變化,通過ADC0809后,得到與光強相對應的數字量,從而引導小車,向光源靠近。不同型號的光敏電阻,暗電阻及亮電阻差別較大,需根據不同參數的光敏電阻,選用不同大小的分壓電阻。
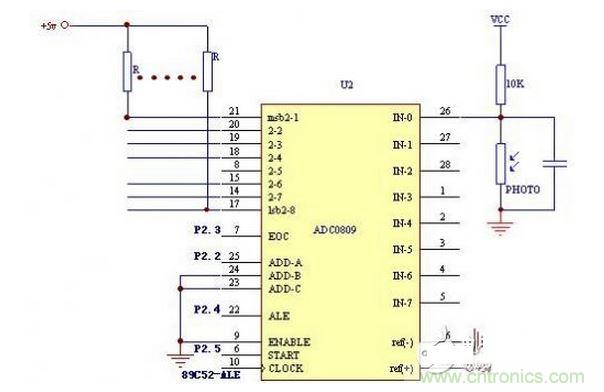
圖5 光源檢測電路
金屬檢測電路
采用了一只渦流型鐵金屬探測傳感器,型號:LJ18A3-8-Z/BX。可靠探測距離,小于8cm。
電機驅動電路
電動小車的本身自帶的換向及驅動電路,相當粗糙,電機的特性也很不好,不能調速。電壓低了,速度慢,驅動力矩小,走不動;電壓高時(剛換上電池時),速度又很快,難以調整。在這上面,花費了不少的時間,效果很不好。最后,決定對小車的電機及驅動電路,進行了更換。后輪采用了一對減速直流電機,其驅動電路如圖6所示。采用PWM控制,可較方便的對電機進行調速。
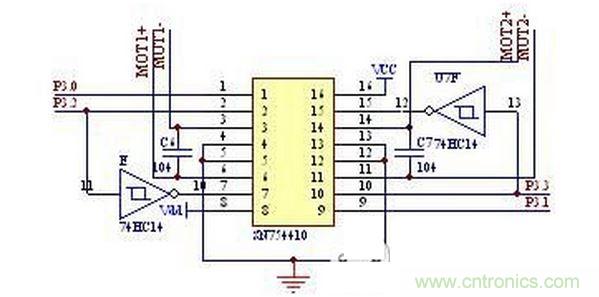
圖6 電機驅動電路
簡易智能電動車由一個電動玩具車改造而成。系統的控制部分以單片機為核心,通過對前向通道各種傳感器信號的采集、處理,較好地實現了后向通道驅動及轉向電機的運動控制和相關信息的處理、顯示和聲光報警。


