

- LIN總線技術簡介
- 車燈系統的硬件電路實現
- 選用InfineonTLE6258系列收發器
- 選用Infineon的BTS系列驅動芯片
LIN總線技術
LIN(LocalInterconnectNetwork)是一種低成本的串行通訊協議,以廣泛應用的SCI(UART)為基礎定義,硬件實現成本低廉。它基于主從結構,單主節點多從節點,無須仲裁機制,使用單線通信,減少了大量線束的重量和費用,其應用目標是帶寬性能要求不高的低速系統,通信速率為1~20Kb/s,目前主要被用于替代CAN總線在汽車網絡化電子控制系統中實時性要求不高的底端電子控制裝置間的通訊。
LIN總線報文傳輸是由報文幀的格式形成和控制。報文幀由主機任務向從機任務傳送同步和標識符信息,并將一個從機任務的信息傳送給其他從機任務。主機任務位于主機節點內部,它負責報文的進度表、發送報文頭(HEADER)。從機任務位于所有的節點中(即主機和從機),其中一個發送報文的響應(RESPONSE)。
一個報文幀(見圖1)是由一個主機節點發送的報文頭和一個主機或從機節點發送的響應組成。
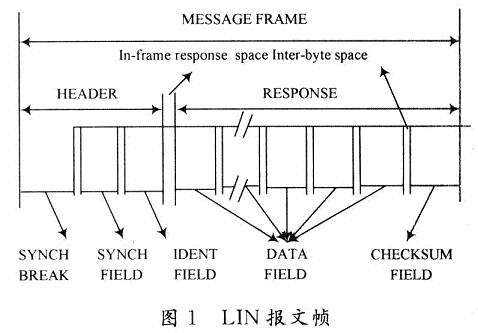
報文幀的報文頭包括一個同步間隔場(SYNCHBREAKFIELD)、一個同步場(SYNCHFIELD)和一個標識符場(IDENTITYFIELD)。報文幀的響應(RESPONSE)則由3~9個字節場組成:2,4或8字節的數據場(DATAFIELD)和1個字節的校驗和場(CHECKSUMFIELD)。字節場由字節間空間分隔,報文幀的報文頭和響應是由一個幀內響應空間分隔。最小的字節間空間和幀內響應空間是0。
車燈系統的硬件電路設計
1車燈系統方案介紹
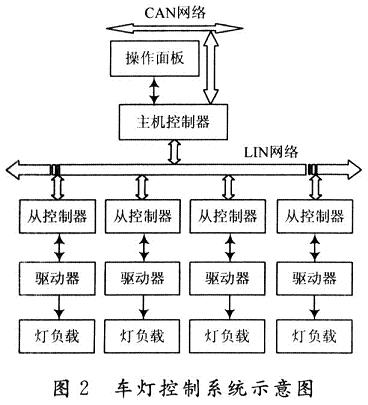
整個車燈系統共包括五個模塊(見圖2):一個主機節點,負責掃描來自操作面板開關信息(如近光燈,霧燈,轉向燈)和來自CAN網絡的開關信息(如剎車燈)。并通過LIN總線將其發送給四個從機節點;四個從機節點包括車頭和車尾各兩個控制節點,負責接收來自LIN總線的開關信息,控制車燈負載動作,并采集由驅動芯片反饋的車燈故障信息,通過LIN總線反饋給主機,由主機節點負責故障信息的處理和顯示。
2硬件選擇及說明
主機和從機MCU分別選用FREESCALE的MC9S08DZ60和MC9S08SG04芯片。DZ60芯片內部集成一個CAN控制器和兩個SCI模塊,可以作為車燈控制模塊和其他車身網絡連接的CAN/LIN網關,實現整車網絡通訊的統一。SG04是FREESCALE公司開發的專門用于車身底端網絡控制節點的汽車級低成本芯片,內部集成一個SCI模塊、兩個PWM模塊和多個A/D轉換模塊,可直接作為LIN網絡的從機節點并能方便的實現對車燈負載的控制及對模擬負載故障信息的采集。
LIN收發器選用InfineonTLE6258系列收發器。TLE6258是單線收發器,適用于LIN協議,發送速率可達20Kb/s,功耗低,具有短路保護和過溫保護功能,適用于汽車和工業應用。為了減小電流損耗,TLE6258提供了一種空閑模式,在空閑模式下,TLE6258退出總線活動,電流降到最低,從而達到減小功率損耗的目的。在正常工作模式下,通過對ENN引腳置1進入空閑模式;在空閑模式下,通過在總線上發送喚醒幀,可把主機或從機從空閑模式喚醒,返回到正常工作模式。進入正常模式后,ENN引腳復位為0,釋放RxD引腳到傳輸數據狀態。
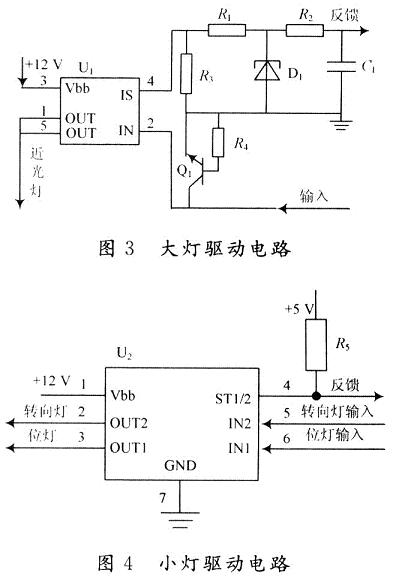
功率驅動芯片選用Infineon的BTS系列驅動芯片:BTS6143D用于驅動大燈,如近光燈、霧燈,BTS724G用于驅動小燈,如轉向燈、位燈。BTS6143D是N溝道FET功率管,內部集成充電泵,電流驅動,并且具有負載電流檢測的故障反饋功能,包括過載、過溫和短路檢測,BTS6143D為單通道輸入輸出,可實現對負載電流的模擬量診斷反饋;BTS724G是電源MOSFET高位開關,帶四通道輸入輸出,且每一對輸入輸出相互獨立,可輸出數字量診斷反饋信號。如圖3,圖4以近光燈、轉向燈和位燈為例分別顯示了大燈驅動電路設計和小燈的驅動電路設計。
車燈系統的軟件設計
系統的軟件設計包括三個相對獨立的模塊設計:主機對來自操作面板和CAN總線的開關信息掃描模塊;主機和從機節點之間信息的通訊模塊;各從機節點對車燈負載的動作控制及故障信息采集模塊。其中后兩個模塊的設計是整個系統軟件設計部分的核心。



