

【導讀】基于紫外線發光二極管(UV LED)設計了一個紫外光通信系統,為此研究了光路設計、時鐘恢復、信道編碼等內容,并重點設計了雙工傳輸協議,用較小的資源實現了4.8Kb/s信息的傳輸。該系統可以用于近距離語音和數據的雙向保密傳輸。
紫外光通信具有非常好的非視距傳輸和保密性能。傳統的紫外光通信系統尺寸過大,難以實際應用。紫外光通信作為一種新的通信手段,其最突出的優點是不易被探測和截收,可以通過散射進行非視線通信,非常適用于近距離抗干擾和有遮擋的通信環境。
國外從20世紀60年代開始研究紫外光通信,完成了從基本原理到實用系統的多方面研究。2000年美國GTE公司為美軍研制成功了一種基于汞燈的新型隱蔽式紫外光無線單工通信系統,該系統通信速率為4.8Kb/s,誤碼率可以達到106 。2002年,美國國防部高等研究計劃局(DARPA)啟動半導體紫外光系統(SUVOS)計劃,其核心任務是制造紫外發光二極管(UV LED)。在該計劃的推動下,目前UV LED已經研制成功并開始量產。
美國加州大學河邊分校和麻省理工學院分別使用UV LED構建了單工通信試驗系統,并對紫外光傳輸信道的特性進行了研究。
國內從2000年開始對紫外光通信技術進行跟蹤,重慶大學、北京理工大學、國防科技大學等單位都先后完成了紫外光單工通信系統原型的研制,傳輸速率最高可達9.6Kb/s。但是到目前為止,國內這些系統采用的紫外光源仍然是低壓汞燈或氙燈,體積和功耗均較大,難以小型化和便攜使用。另外一個突出的問題是:國內外的這些系統都只能進行單工通信,一定程度上限制了系統的實用性。
本文研究并設計了一種基于UV LED的雙工紫外光通信系統方案,可用于空天短距離語音和數據的雙向保密傳輸。
一.紫外光通信的特點
紫外光通信具有如下一些特點:
1.波長為200~280nm。這個頻段是開放的,不受無線電管理委員會的限制,使用時不需要進行頻率申請。
2.200~280nm的紫外光屬于日盲段。這個波長的太陽光受大氣分子和懸浮顆粒的吸收,信號強度按指數規律衰減,到達地表附近時的能量非常微弱。因此,紫外光通信的背景噪聲非常小。
3.由于受大氣衰減的影響,紫外光適合1km范圍內的短距離通信,超過這個范圍后將難以探測,對它進行干擾和偵聽的可能性很小。因此,紫外光通信的保密性非常高。
4.紫外光源對接收器視場所在空間進行照射,通過彌漫在大氣層中的微小顆粒,散射到接收器的視場區,并被接收器接收。因此,紫外光可以進行非視線通信(NLOS),適合在有遮擋的場景中使用。
由于上述特點,紫外光通信系統可在戰術移動通信和保密通信中得到廣泛應用。
二.雙工紫外光通信系統設計
目前的紫外光通信系統都是單向通信,調制方式采用的是常規的OOK(通斷)和PPM(脈沖位置調制)模式。若想實現雙向通信,一種方案是采取頻分復用的方式,收發雙方在200~280nm范圍內分別占用一個不同的波長;另外一種方案是采取時分復用的方式,收發雙方共用一個波長,但是占用不同的時間片。由于日盲段的波長范圍有限,前一種方案的系統容量難以提高。本文采取第二種方案。
1.系統組成
系統的核心部件是UV?LED和紫外光檢測器,此外還有一片可編程邏輯陣列(FPGA),外接語音壓縮編解碼芯片和USB接口芯片,分別用來支持語音和數據的傳輸,如圖1所示。
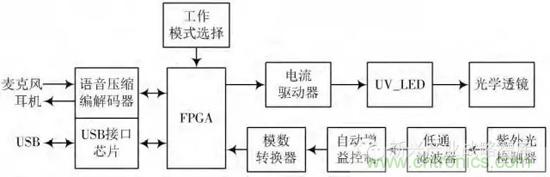
圖1紫外光通信系統組成框圖
其中UV LED選用的是韓國首爾光設備公司的T5F28,其波長為280nm,發射功率為150mW。光檢測器選用的是日本濱松公司的R7154,其波長范圍為160~320nm。FPGA主要完成四個方面的功能:接收數據的定時恢復和判決;數據的加擾和解擾;信道編譯碼;數據的組幀和解幀。
當系統處于發送模式時,組幀之后的信號首先進行2PPM的調制,然后通過電流驅動器去驅動UV LED,產生受控的紫外光;當系統處于接收模式時,紫外光檢測器把收到的光信號轉換成電信號,通過低通濾波器和自動增益控制器,經模/數轉換后送給FPGA進行后續處理。
2.關鍵技術
在紫外光傳輸系統的設計過程中,需要解決如下關鍵技術。
(1)光路設計
由于紫外光的散射傳播特性,UV LED的視場角和檢測器的視場角重疊的區域越大,接收到的光能量就越多,接收信噪比就越高。考慮到系統選用的UV?LED的視場角只有10°,為了增大收發雙方在存在視線遮擋情況下的重疊區域,需要通過光學透鏡增大發送光源的視場角。凹透鏡能夠對入射光束起發散作用,如圖2所示,所以通過多個凹透鏡的組合并調節UV?LED和凹透鏡的距離,就可以得到滿足要求的發射視場角。
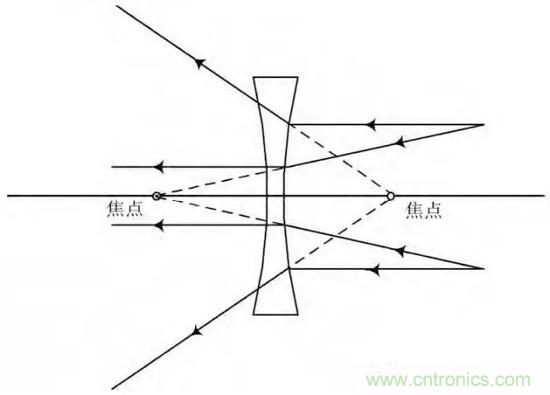
圖2凹透鏡典型光路示意圖
(2)定時恢復
和常規的數字通信一樣,接收端需要對檢測器輸出的電信號進行時鐘恢復,并對最佳采樣點進行判決。另一方面,由于調制方式采取的是2PPM,常規數字接收機中的載波恢復在這里并不需要。
時鐘誤差估計算法可采用經典的Gardner算法,這里不再贅述。
(3)擾碼、信道編碼
為了提高數據傳輸的抗干擾能力,可在系統中加入信道糾錯編碼。同時為了更好地進行定時恢復,還需對發送的數據進行加擾處理。這里使用的擾碼多項式為x5+x3+1,信道糾錯編碼為(2,1,7)卷積碼,其生成多項式為(171)o,133o。
(4)雙工通信協議
在紫外通信系統中,由于紫外光源和檢測器的波長是固定的,要想支持多個用戶間的雙向通信,采用時分復用的多址方式(TDMA)和載波偵聽的接入方式(CSMA)是一種較好的選擇。
對于一個用戶容量為N的系統,一共設置N個時隙,每一個用戶占用一個時隙。考慮到紫外光通信的范圍通常在1km×1km以內,所以時隙之間的保護間隔可以設置得非常小。
以容量為10人的紫外光語音通信系統為例說明數據幀結構的設計。考慮到通常情況下人講話的語速為每分鐘160~180個漢字,在保留一定余量的情況下,假設每分鐘240個漢字,如果壓縮后的語音信號速率為4.8Kb/s,可以算出平均每個漢字時間內的比特數為1200b。據此設計的數據幀結構如圖3所示,其中數據的信息速率為60Kb/s,信息體長度為1200b,時隙頭長度為96b。時隙頭包括前導序列、信息類型、發送方代號和接收方代號,長度分別為72b,8b,8b和8b。每一個用戶只處理接收代號和自己的代號一致的時隙。收發雙方作為一個組合占用相鄰的兩個時隙。前導序列為0,1交替的序列,信息類型的定義如表1所示。
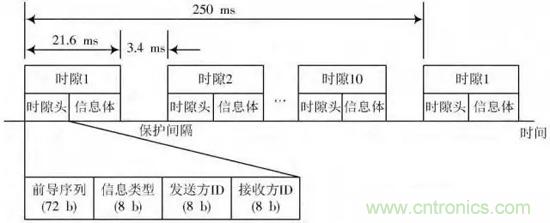
圖3 數據幀結構設計

整個系統的工作流程如下:
用戶接入:如果用戶k需要發起和用戶j的通信,首先監聽時隙1~10,如果用戶j處于忙狀態,則等待;否則如果信道上有空閑時隙對,則利用該時隙對的前一個時隙進行接入申請,同時接收自己的申請信息。如果接收的信息和發送的信息一致,表明沒有另外一個用戶正在競爭該時隙,則可以占用該時隙,用戶j利用該時隙對的后一個時隙發出申請應答信息;如果接收的信息和發送的信息不一致,表明有另外一個用戶正在競爭該時隙,則隨機延遲Δ(Δ的范圍取決于總的用戶數)個數據幀的時間后再進行接入申請。
用戶退出:如果用戶k或j要退出該系統,需要利用其占用的時隙發出斷開申請,對應的用戶發出斷開應答后,雙方同時釋放占用的時隙對。
系統同步:為了保證整個系統的時鐘同步,避免不同用戶時隙的相互重疊,可采取兩種措施:
(1)時隙間留有3.4ms的保護間隔;
(2)除了加入系統的第一個用戶,后續用戶都要通過鎖相環技術把自身的時鐘調整成和第一個用戶一致。所有的用戶退出系統后,系統的時鐘同步又要以第一個新接入的用戶為基準而重新開始。
3.系統測試
紫外光收發模塊如圖4所示,板卡尺寸均小于5cm×5cm。為了加大紫外光的發射功率,在發射端還采用了LED陣列。基于上述模塊構建的測試系統表明,收發雙方在室內可以實現4.8Kb/s的清晰的語音通信。后續還將進行室外環境下的測試。

圖4紫外光收發模塊
三.結語
紫外光通信不易被探測和截收,可以通過散射進行非視線通信,非常適用于近距離抗干擾和有遮擋環境下的通信。本文設計了一個基于LED的紫外光通信系統,研究了光路設計、時鐘恢復、信道編碼等方面的內容,并重點設計了雙工通信協議,初步開展了鏈路性能測試。該系統將可用于語音和數據的雙向保密傳輸。




