

中心議題:
- 開關電源電流模式的原理分析
- 開關電源電流模式的缺點
- 開關電源斜坡補償?shù)脑矸治?/strong>
1.引言
開關電源是利用現(xiàn)代電力電子技術,控制開關晶體管的導通和關斷的時間比率,維持輸出電壓穩(wěn)定的一種電源,它和線性電源相比,具有效率高、功率密度高、可以實現(xiàn)和輸人電網(wǎng)的電氣隔離等優(yōu)點,被譽為離效節(jié)能電源M目前開關電源已經應用到了各個領域,尤其在大功率應用的場合,開關電源具有明顯的優(yōu)勢。
開關電源一般由脈沖寬度控制(PWM)IC、功率開關管、整流二極管和LC濾波電路構成。在中小功率開關電源中,功率開關管可以集成在PWM控制IC內。開關電源按反饋方式分為電壓模式和電流模式。電流模式開關電源因其突出的優(yōu)點而得到了快速的發(fā)展和廣泛的應用。但是電流模式的結構決定了它存在兩個缺點:恒定峰值電流而非恒定平均電流引起的系統(tǒng)開環(huán)不穩(wěn)定:占空比大于50%時系統(tǒng)的開環(huán)不穩(wěn)定。
本文旨在從原理上分析傳統(tǒng)電流模式的缺陷及改進方案,之后分析一個實用的斜坡補償電路。
2.電流模式的原理分析
開關電源可以有很多種結構,但原理基本相似。圖1是電流模式降壓斬波fg(Buck)開關電源的原理圖。它和電壓模式的主要區(qū)別是增加了電流采樣電阻R3和電流放大器IA. R3的阻值一般很小,以避免大的功耗。功率管Ql在每個周期開始的時候開啟并維持一段時間Ton,通過濾波電感Lo對濾波電容C。充電、同時向負載提供電流,此時Lo上電流隨時間的變化率為
電感電流到達一定值后功率管關斷,二極管D1起續(xù)流和鉗位作用。設DI的導通壓降為VZ,則此時
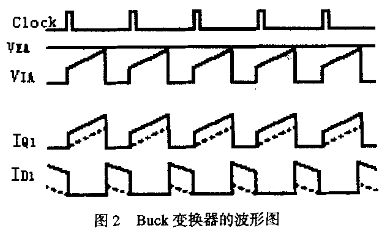
RI和R2分壓后和Vπf 比較并放大,變?yōu)樾盘朧EA;同時R3兩端的壓降經IA放大后變?yōu)樾盘朧IA,當VIA高于VEA時,相關控制電路將控制功率管關斷,從而達到調節(jié)占空比的目的。通過實時地調節(jié)占空比,輸出電壓可以穩(wěn)定在一個預先設定的值。上述工作過程的波形如圖2,實線表示連續(xù)工作模式,虛線表示不連續(xù)工作模式,其中Clock表示時鐘信號,VEA表示EA的輸出,VIA表示IA的輸出,IQ1是功率管的電流,ID1是二極管電流

 [page]
[page]
電流模式由于采用了電壓一電流雙環(huán)控制顯著改善了開關電源的性能,主要表現(xiàn)在:
① 根本消除了Push-pull開關電源存在的磁通量失恒問題磁通量失恒會減弱電感的承壓能力,導致功率管電流不斷增大并最終燒毀。電流模式在每個周期都限定功率管峰值電流,能徹底杜絕磁通量失恒.
② 電壓調整率顯著減小。當輸人電壓波動時圖1中的電流檢測電阻R3會立即檢測到峰值電流的變化,快速調整占空比,使輸出電壓穩(wěn)定
③ 簡化了反饋電路的設計LC濾波電路在頻率達到共鳴頻率![]() 后,相移會接近最大值180°,輸人到輸出的增益會隨著頻率的升高而迅速減小,這就增加了開關電源反饋電路設計的復雜程度在電流模式中,濾波電感的小信號阻抗幾乎為零,這樣就只能產生最大90,相移,增益隨頻率升高而下降的速度也減小為實際LC濾波電路的一半。因此反饋電路的設計可以大幅簡化
后,相移會接近最大值180°,輸人到輸出的增益會隨著頻率的升高而迅速減小,這就增加了開關電源反饋電路設計的復雜程度在電流模式中,濾波電感的小信號阻抗幾乎為零,這樣就只能產生最大90,相移,增益隨頻率升高而下降的速度也減小為實際LC濾波電路的一半。因此反饋電路的設計可以大幅簡化
④ 改善了負載調整率。在電流模式中,誤差放大器的帶寬更大,因而負載調整率更好。
3.電流模式的缺點
3.1恒定峰值電流引起的電感平均電流不恒定
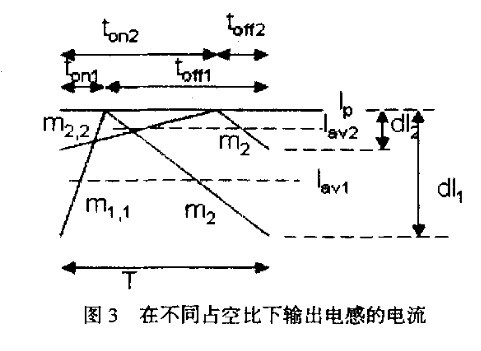
電流模式的實質是使電感平均電流跟隨誤差放大器輸出電壓VEA設定的值,即可用一個恒流源來代替電感,使整個系統(tǒng)由二階降為一階。但在常用的峰值電流模式中,不同的占空比會導致不同的電感平均電流。這可以由平均電流的計算式看出:

其中Ip是峰值電流,dl是峰值電流和最小值的差值,T是時鐘周期,ton和toff分別為功率管開啟時間和關斷時間
如圖3所示,當由于某種原因使輸人電壓從Vdc1變化到Vdc2,電感電流的上升沿斜率將會變化(Vdc2-Vdc1)/Lo而下降沿斜率不變.占空比將從Dl變?yōu)镈2,電感電流的平均值從Iav1變化到Iav2,這往往會導致輸出電壓在一段時間內振蕩
3.2 電感擾動電流引起的輸出振蕩
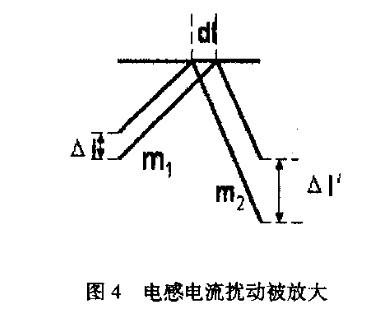
在輸入電壓不變的條件下,當由于某種外部原因使電感上的電流在一個下降沿結束時發(fā)生小的擾動AI,因為電流的上升沿和下降沿的斜率以及峰值電流都不變,所以在下一個周期結束后,這個擾動電流將被放大為
其中dt為發(fā)生擾動后導通時間的變化值,m1和m2分別為上升斜率和下降斜率。
[page]
從( 2)式可以看出,當占空比小于50%時,m2<m1,△I''''''''''''''''<△I,即一個周期后擾動電流減弱。但是當占空比大于50%時,m2>m1,△I''''''''''''''''>△I,即一個周期后擾動電流增強,如圖4所示。這同樣也會引起輸出電壓在一段時間內的振蕩
4.斜坡補償?shù)脑矸治?/strong>
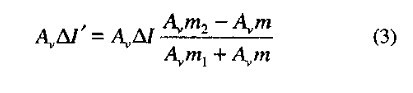
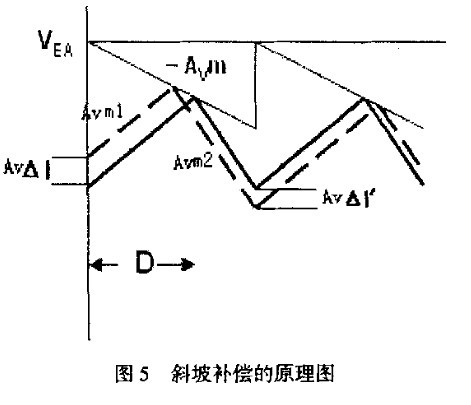
前面分析的兩個不穩(wěn)定情況實際上都是因為占空比改變引起了電感平均電流的變化,最終導致輸出電壓在一段時間內振蕩,尤其當占空比大于50%時更加嚴重。如果能使系統(tǒng)在占空比足夠大的時候才發(fā)生上述不穩(wěn)定現(xiàn)象,就相當于解決了這兩個問題。設圖1中電阻R3上的壓降為Vs,可以嘗試在Vs上疊加一個斜率為m,且在時鐘周期起點處等于零的電壓,則經IA放大后相當于在信號VIA上疊加了一個斜率為Avm的電壓。再設電感上有擾動電流AI,經IA放大為AvAI。由圖5可以證明,經過一個周期后這個擾動電流的值變?yōu)?br />
把m1D=m2(1-D)代入(3)式得

要使擾動電流在第一個周期就減弱,必須要有
(5)式表明,在斜坡補償前,占空比達到50%后系統(tǒng)就開始不穩(wěn)定,斜坡補償之后,只要補償斜率m滿足式(5)的關系,系統(tǒng)始終是穩(wěn)定的。
由此可見,只要能確定電感電流下降沿的斜率m2和占空比D,就有可能設計出合適的斜坡補償電路,解決峰值電流控制型開關的輸出振蕩問題。
[page]
4.1 實際的斜坡補償電路分析
在電流模式PWM IC內部集成斜坡補償電路要比理論分析復雜得多,因為在不同應用情況下,(5)式中的m2和D也會不同,所以很難對所有可能的情況作最好的補償。由( 5)式 可以看出,開關電源穩(wěn)定工作時占空比D和電感電流下降沿斜率m2越大,那么它所需的斜坡補償?shù)牧恳簿驮酱蟆T谶B續(xù)工作模式中,D和m2都是由電路結構決定的。而在不連續(xù)工作模式中,D是隨負載變化的量,m2是由電路結構決定的。根據(jù)這個原理可以設計一個補償量隨占空比增大而增大,并且能夠適合一定范圍的m的斜坡補償電路,如圖6。其中Vcc是較穩(wěn)定的電壓,約為2.3V,Vosc是PWM內部振蕩器輸出的鋸齒波,最小值和最大值分別為0.6V和1.7V, Vdrv是功率管的柵極控制信號,Iout是斜坡補償電流,輸出到電流采樣電阻(如圖1中的R3)的正端,從而在采樣電阻上疊加了一個電壓降,達到斜坡補償?shù)哪康摹?/p>
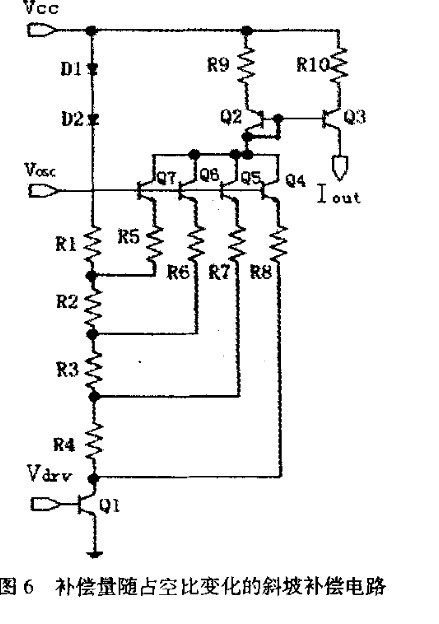
鉗位二極管DI、D2,分壓電阻網(wǎng)絡RI,R 2.R 3和R4共同決定了Q5, Q6和Q7的開啟點當一個時鐘周期開始時,Vdrv由低變高,Q1管導通,同時Vosc從最小值開始以一定的斜率上升Q4、Q5, Q6和Q7先后開啟,這四個晶體管集電極電流的總和被由Q2, Q3, R9. R10構成的比例電流鏡鏡像后輸出到Iout。
設NPN晶體管的開啟閡值為VTn,D l和D2的正向導通壓降都為VD, Ql的C-E結壓降近似為零,則通過兩個二極管的電流為
因此Q4, Q5. Q6. Q7的開啟點分別為

其中Ib0、IQ50是Q6開啟時的二極管和Q5的電流,Ib1、IQ51、IQ60是Q7開啟時的二極管、Q5和Q6的電流。[page]
Q2 的集電極電流為上述四個晶體管的集電極電流總和:
因為 Q4 ,Q5,Q 6和Q7是先后開啟的,所以補償電流在時間軸上的斜率dlout/dt將隨著Vosc的增大而增大,即斜坡補償?shù)牧侩S占空比增大而增大。
功率管的導通時間結束時,Vdrv由高變低,Ql關斷,Iout隨即降為零。這樣可以減少不必要的系統(tǒng)功耗。
考慮不同應用情況下m2的變化范圍,計算(5)式就可以確定m隨D變化的曲線,再根據(jù)電流放大器IA的增益和振蕩器鋸齒波斜率計算可得各元件的尺寸。
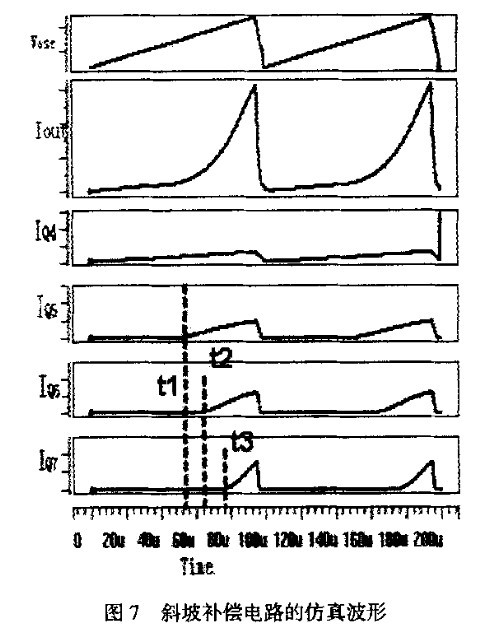
圖7是在選取了元件尺寸后計算機仿真波形。其中Vosc是理想化的鋸齒波,Iout是輸出的補償電流,IQ4、IQ5、IQ6、 IQ7分別是Q4, Q5, Q6和Q7的漏極電流,可以看到,為了在占空比小于50%的時候系統(tǒng)更加穩(wěn)定,Q4在每個周期開始時就已經開啟,但是電流的斜率較小。隨著Vosc以恒定的斜率上升,將先后在t1, t2, t3時達到Q5, Q6和07的開啟點。設Q4, Q5, Q6, Q7開啟后的電流斜率分別為m4, m5, m6和m7,

設電流采樣電阻的阻值為RS,那么疊加在該電阻上壓降的斜率為:
5.結論
本文分析了傳統(tǒng)電流模式開關電源的工作原理及其優(yōu)劣,從原理上解釋了電流模式在占空比大于50%后輸出不穩(wěn)定的問題和解決的方法。在此基礎上本文分析了一個實用的斜坡補償電路結構并詳細分析了其工作過程。通過HSPICE的仿真分析,得到了預期的結果,證明了該電路的可行性。


