

中心議題:
- 磁場定向控制技術
- 無位置傳感器控制技術
- 變速驅動設計的HVIC技術
- 三相混合式多細分步進電機驅動器設計
相關閱讀:
馬達設計的技巧
http://hdh-sz.com/art/artinfo/id/80006683
高性能和高效馬達控制器設計
http://hdh-sz.com/art/artinfo/id/80004931
基于一種低成本的新型步進電機驅動器的研制
http://hdh-sz.com/art/artinfo/id/80012061
高效節能是目前電子產品設計總的發展趨勢,因此,電子產品對驅動馬達的高效率和低功耗提出了更高的要求。在此要求之下,馬達的控制系統設計以及驅動器設計在小型化、高效率、低噪聲和更高的可靠性方面有了更進一步的發展。本文介紹馬達控制技術(包括控制器和驅動器的設計技術)的最新進展,主要從磁場定向控制技術、無位置傳感器控制技術、HVIC驅動設計技術及三相混合式多細分電機驅動器設計技術的角度進行分析。
磁場定向控制提升性能和功效
磁場定向控制(Field-Oriented Control, FOC), 有時也稱之為磁束矢量控制——是一種能夠使永磁同步電機(或無刷伺服電機)在整個速率范圍內獲得最高性能的方法。其特點是通過坐標變換技術把交流電機的定子電流分解為轉矩和勵磁分量,從而實現象直流電機一樣控制電機的輸出轉矩和磁通,使交流電動機的控制的動態指標和精度大大提高。
磁場定向控制的總體流程如圖1所示:
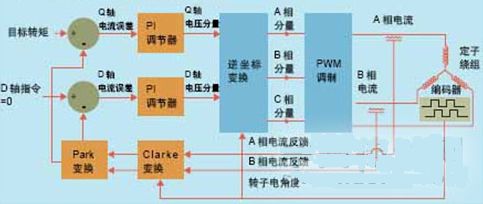
圖1 磁場定向控制的總體流程
從控制原理上講,磁場定向控制方法的電流環運行是獨立于電機旋轉的。在FOC方法中存在兩個實際的電流環,一個用于Q軸轉矩,另一個用于D軸轉矩。Q軸轉矩電流環施以來自伺服控制器的用戶目標轉矩,D軸電流環則施以零輸進指令,以便使不想要的直軸分量降至最低。
FOC的主要優勢有以下幾點:
- 可提供低速(低至0rpm)大力矩(小于0.5%的力矩波動);
- 即使在高速時也保持高效率;
- 在電壓限制范圍內磁場弱化時可完全控制
- 力矩和電流響應時間小于0.2ms;
- 電流控制器帶寬大于2000Hz。
由于磁場定向控制可為電機提供寬泛的可用速度范圍,該方法已成為無刷直流電機的一種重要驅動和換相方法,同樣也成為交流感應電機的控制方法之一。采用FOC方法的交流感應電機可以使電機運行效率進步到85%,相比之下,不采用磁場定向方法卻只有60%左右。另外,采用FOC方法的無刷直流電機甚至可以達到更高的效率,即高達95%。
[page]
無位置傳感器控制技術
在一些應用場合要求使用的電機體積小、效率高、轉速高,微型永磁無刷直流電機能夠較好地滿足要求。無刷直流電機的無位置傳感器控制的難點在于轉子位置信號的檢測,目前國內外研究人員提出了諸多方法,其中反電動勢法最為簡單、可靠,應用范圍最廣泛。
實現無刷直流電機電子換相及PWM控制的逆變器主電路如圖a所示。采用兩兩通電方式,即每一個瞬間有兩個功率管導通,每隔60°電角度換相1次,每一功率管導通120°電角度。功率管的導通順序是:V6V1→V1V2→V2V3→V3V4→V4V5→V5V6。
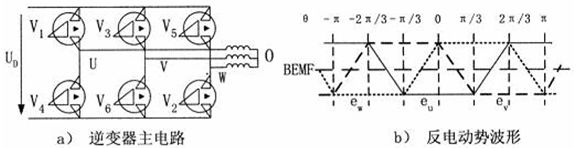
圖2 逆變器主電路和點擊的反電動勢波形圖
無位置傳感器控制系統以C8051F330單片機、逆變橋電路、端電壓檢測電路、穩壓電路等組成。逆變橋電路中上橋臂為P型MOSFET器件FDS6679,下橋臂為N型MOSFET器件M4410B,均為低電壓驅動器件。FDS6679通過一個NPN型三極管驅動,而M4410B由C8051F330的P1口直接驅動(P1口設置成推挽輸出)。PWM控制模式定為:PWM僅應用于半橋的下端MOSFET,同時換流的上端(對角線)MOSFET僅起換相通斷控制。
電源電壓和電流的檢測:當UV相通電,在PWM開通期間檢測U相的端電壓Uu,由于MOSFET的通態電壓很小(小于0.1V),端電壓uu可以近似看作是電源電壓UD;在下橋臂源極和電源地之間串接采樣電阻,通過P0.4口檢測電阻電壓得到電流值,輸入信號先經過內部可編程增益放大器放大,再作A/D轉換。
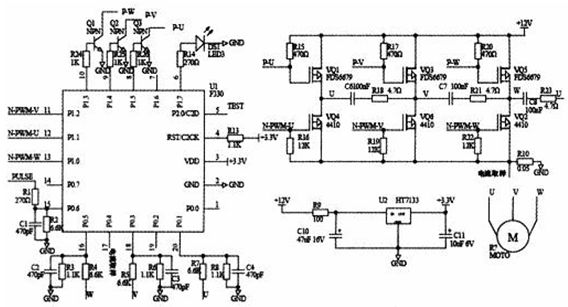
圖3 無位置傳感器控制系統的硬件電路圖
無刷直流電機的無位置傳感器控制
http://hdh-sz.com/art/artinfo/id/80006685
變速驅動設計的HVIC技術
可變速電機驅動可以提高機器設備的能源效率,最新的HVIC(高壓集成電路)技術使得大多數必需的反饋和保護器件可以制作在一個基片上,這樣就可以在范圍更大的市場和應用里,來實現成本低廉、結構緊湊的可變速驅動。
HVIC技術使得位準移動成為可能,即感測一個漂移在大的普通模式電壓上的小差分電壓,甚至在快速瞬變的時候。因此,快速而準確的電流感測在電機的相位超前就可實現,從而可以減少硬件設計和信號處理的工作。具體的實現方法是將一個低側接地CMOS電路和一個高側浮動CMOS制作到一起,通過N或P溝道LDMOS區域相隔離。LDMOS的作用是位準移動,目的是在低側和高側電路之間跨過高壓柵來傳遞控制信號。位準移動電路不受高達50V/ns的快速瞬變的影響,同樣也不受來自于IGBT變換器典型的10V/ns噪聲的干擾。
[page]
電機電流是通過使用一個外部分流晶體管來感測的,HVIC可將小的差分電壓(±250mV)通過一個精密電路轉換為時間間隔,這個精密電路的紋波去除功能有助于顯示小的群延遲。時間間隔是快速瞬變的,會被帶到輸出端。這樣就可以獲得與測量電流相對應的模擬輸出電壓,以便與外部參考電壓相比較,最大采樣率為40kSPS。對于頻率高達20kHz的非對稱PWM調制來講,這個采樣速率富富有余。20kHz時的最大延遲小于7.5s,對于被用來IGBT保護的電流感測信號來說也夠快了。圖4是電流感測電路。
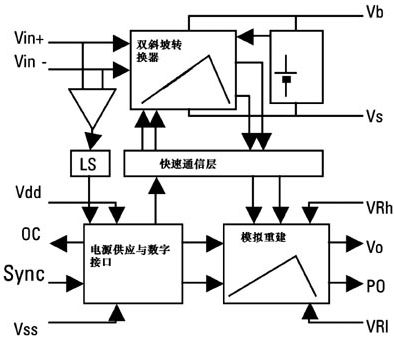
圖4 HVIC應用中線性相電流感測電路
變速電機驅動設計的HVIC技術
http://hdh-sz.com/art/artinfo/id/80008313
三相混合式多細分步進電機驅動器
步進電機的細分控制從本質上講是通過對步進電機的定子繞組中電流的控制,使步進電機內部的合成磁場按某種要求變化,從而實現步進電機步距角的細分。最佳的細分方式是恒轉矩等步距角的細分。一般情況下,合成磁場矢量的幅值決定了電機旋轉力矩的大小,相鄰兩合成磁場矢量的之間的夾角大小決定了步距角的大小。在電機內產生接近均勻的圓形旋轉磁場,各相繞組的合成磁場矢量,即各相繞組電流的合成矢量應在空間作幅值恒定的旋轉運動,這就需要在各相繞相中通以正弦電流。
三相混合式步進電機的工作原理十分類似于永磁同步伺服電機。其轉子上所用永磁磁鐵同樣是具有高磁密特性的稀土永磁材料,所以在轉子上產生的感應電流對轉子磁場的影響可忽略不計。在結構上,它相當于一種多極對數的交流永磁同步電機。
驅動器的總體方案如圖5所示,主要包括單片機電路、電流追蹤型SPWM電路和功率驅動電路組成。
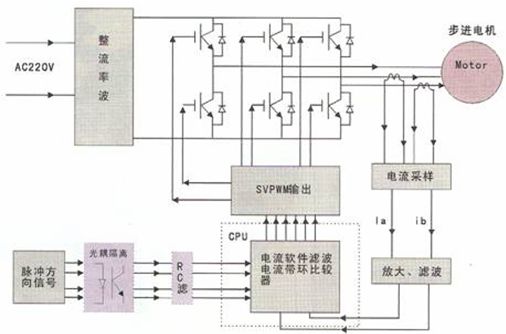
圖5三相混合式步進電機驅動器的整體方案框圖
其中,單片機電路采用DSP電機控制專用芯片TMS320LF2407A,電流追蹤型回路的傳輸方式以模擬電壓的幅值代表采樣電流或者電壓的大小,其主要用來采樣a,b兩相電流及母線電壓檢測,實現電機電流控制以及過壓、欠壓、過流保護。驅動器的主回路采用交—直—交電壓型逆變器形式,由整流濾波電路、三相逆變器以及步進電機等組成。
三相混合式多細分步進電機驅動器
http://hdh-sz.com/art/artinfo/id/80006533
總結
以上介紹的馬達控制系統設計及驅動器設計技術,在提高馬達控制的效率和可靠性,降低功耗,減小尺寸方面的效果非常明顯,當然還有很多其他新的設計技術和產品,例如,安森美半導體開發的雙極步進電機驅動及控制器AMIS-3062x系列的AMIS-30623可以滿足更高能效的要求。工程師可以根據設計的實際需求分析,選擇合適的馬達驅動和控制方案。



