

【導讀】電壓源前后級的高頻開關動作很容易引起兩級間的互相干擾,在母線電壓比較高的時候尤其明顯。因此在兩級之間串接共模抑制器Lc1,用來隔離其相互間干擾。
電源主電路如圖1所示,分上下兩部分,上部分為電壓源部分,下部分為電流源部分,每部分采用兩級結構,交流輸入整流濾波后,先經過DC/DC變換,再通過逆變器輸出。其中DC/DC采用半橋電路用來提供穩定的直流母線電壓,并隔離輸入級和輸出級。逆變部分采用了常規全橋逆變電路,適合于較大功率的應用場合。輸出采用兩級LC濾波器濾除高頻紋波。Lc1、Lc2、Lc3是共模抑制器。電壓源前后級的高頻開關動作很容易引起兩級間的互相干擾,在母線電壓比較高的時候尤其明顯。因此在兩級之間串接共模抑制器Lc1,用來隔離其相互間干擾。Lc2,Lc3接在輸出端和負載之間的,作用和Lc1類似,用于抑制高頻共模分量通過負載。所不同的是電壓源前級DC/DC采用全橋整流,電流源采用全波整流。
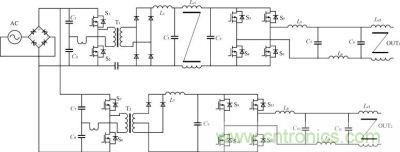
圖1:前級DC隔離電源與逆變電源
控制原理與結構
對于DC/DC級的控制,本文采用SG3525控制芯片,簡單可靠,成本低。
后級逆變器采用了雙極性SPWM控制,如圖2所示。通過高頻三角波和基準正弦波的比較得到控制開關管的PWM波形。正弦基準信號的頻率與輸出正弦波相同,其幅度的變化可以調制開關的占空比D。幅度調制比ma定義為
ma=Vsm/Vcm (1)
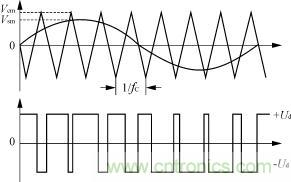
圖2:三角波與逆變器開關控制波形
式中:Vsm是正弦基準信號峰值;
Vcm是三角波的峰值。
逆變輸出正弦電壓峰值Vom和直流母線電壓Vd的關系為
Vom=ma×Vd,ma≤1(2)
圖3是具體控制原理。為消除輸出諧波,電路采用了電壓、電流雙環控制,其中,Vf為反饋電壓,If為反饋電流。電壓調節環的輸出作為電流環的比較基準,電流環輸出誤差信號與三角波信號比較得到SPWM信號。由IR2110芯片構成驅動電路,由此輸出相位互補的兩路SPWM信號分別驅動四個開關管。為防止上下橋臂直通,兩路SPWM信號之間必須設置死區。保護電路起到監控Vf、If的作用,如果幅值超出閾值,保護電路將關閉驅動信號。
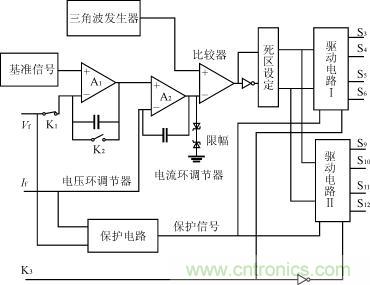
圖3 :逆變級控制電路
多功能輸出的實現
在此電源系統中,電壓源和電流源的控制采用同一控制電路,通過繼電器切換到不同的工作模式。電壓源工作時,繼電器K1合,K2開(如圖3所示),采用電壓、電流雙環調節控制,基準信號為正弦信號,輸出交流電壓;基準為直流電平,輸出直流電壓。電流源工作時,K1開,K2合,電壓調節環變為跟隨器,只通過電流環調節,基準為正弦信號,輸出交流電流;基準為直流電平,輸出直流電流。電壓源和電流源驅動信號切換是通過K3來實現的,在電壓源工作方式,關斷電流源的前級;在電流源工作方式,關斷電壓源的前級,這樣可以防止干擾,提高電路的可靠程度。以上的K1、K2、K3是由數控電路給出的。
占空比限制與輸出交流電壓的削頂
PI調節器輸出限幅的考慮
由于所采用的專用驅動芯片IR2110是通過自舉供電方式來驅動橋臂上管的(如圖4所示)。所以,在上、下管驅動信號恒低或恒高時,給上管供電的自舉電容C1能量得不到補給。當電容上的能量放完后,上管關斷,就會出現此橋臂無驅動信號,無輸出的現象。尤其是直流電壓時,常有這一現象。
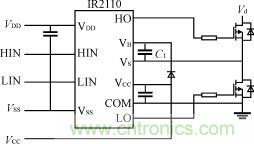
圖4 :逆變級驅動電路
在逆變器控制中,PI調節器輸出的幅度如果超過三角波的幅度,就會出現過調制的現象,此時,PWM驅動脈寬會過窄或過寬,還會使上述自舉電路工作不正常。因此,必須對占空比的最大值與最小值加以限制。
具體方法是,可以在PI調節器的輸出端作一定的限幅(見圖3),使控制電路不出現過調制的情況,限制PWM的最大、最小占空比,使IR2110的自舉電容C1能及時充電。采用限幅的另一個好處是消除了由于IR2110自舉失敗導致的電路損壞,提高了可靠性。



