
采用了片上反饋環路補償,結果就是需要選擇功率路徑元器件以適應反饋環路的要求,一般來說,這是達不到最優化的安排。例如,給定的調整器可能要求用戶在給定的范圍內選擇電感器以及輸出電容器,以確保在反饋補償電路具有雙零點的位置出現LC雙極點頻率。雖然你可能獲得一個穩定的環路,但是,你可能不具備滿足電源路徑要求的、接近理想的數值。
解決方案就是依賴于外部由用戶選擇的環路補償。然而,那對于新的用戶可能會存在一些問題。反饋環路被認為是難以補償的!在上世紀80年代,最初引入的一種創新就是采用電流模式控制。那個控制配置把輸出濾波器的階數降低了1階,由一階濾波器系統來實現,從而極大地簡化了環路補償的設計任務。然而,電流模式控制并不是像最初希望的那樣是萬能藥。噪聲靈敏度就是一個主要問題。
最新開發的電流模式控制的版本被稱為仿真電流模式控制(ECM),它極大地改善了以非常高的降壓比率工作的能力,與此同時,維持良好的抗噪聲特性。因此,對于輸入電壓額定值高達75V的情況,有可能在許多高輸入電壓應用中擁有很大的設計裕量,與此同時,仍然能夠產生當今數字電路所采用的那種輸出電壓。環路補償成為了一種相對簡單的設計,而現成的軟件能夠使設計從用戶的觀點看幾乎是微不足道的事情。
傳統的電流模式基礎
那么,首先要掌握電流模式控制是如何工作的?人們一直企圖采用復雜的數學公式來解釋電流模式控制的工作原理。然而,有些網友認為,如果必須采用數學方法來解釋某事,那就是因為你不了解它。因此,讓我們看看,我們能否開發一種簡單的直覺方法來理解電流模式控制。
基本概念就是把電源級轉換為一個電流源,其受控電流的水平由一個誤差放大器控制。誤差放大器監測輸出電壓,并根據輸出電壓與其理想值之間的偏差來控制電流。控制電感電流的常見方法就是測量該電流并當這一電流達到期望電流值時關閉高邊FET(控制FET)。
從輸出濾波器—由一個跟負載電阻并聯連接的電容組成—的觀點來看,電感器的構成就像一個可編程電流源。在誤差放大器輸出中的任何小的信號偏差將導致通過電感器的小的信號電流變化。這些小的信號電流變化流過輸出濾波器網絡的阻抗,從而導致輸出上電壓的微小變化。因為輸出RC濾波器是一階系統,對輸出小信號響應的控制(也稱為安置增益)也是一階的。因此,系統非常易于進入穩定狀態。
[page]
ECM基礎
大多數傳統的電流模式調整器通過監測控制FET的開態電流—ECM—來測量電感器的電流,另一方面,剛好在再次打開控制FET之前測量捕獲二極管中的電流。這一信息然后由采樣和保持電路捕獲,而采樣和保持電路由調整器的板上時鐘進行門控。
二極管的電流信息被保持,然后,控制FET被打開。接著,小電流源開始為斜坡電容充電,其容值已經被選為正比于電感器的數值。充電電流被編程為正比于輸入-輸出的電壓差。正因為如此,在這個電容上產生的斜坡電壓具有正比于電感器電流斜坡的斜率。
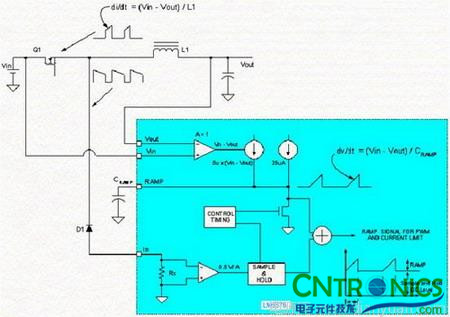
圖1:仿真電流模式控制方框圖。
當斜坡電壓接著被疊加至以前采樣下來的電流測量值之上,結果得到一個看起來很像控制FET的電流波形的梯形波形,減去所有常見的非理想特性。這就賦予ECM精確地控制非常窄脈沖的開關的能力,這是大降壓比率調整器非常需要的一種特性。然而,問題依然存在,小信號的行為仍然是電流模式調整器所期望的那樣嗎?實際上,下面的測量繪圖表明,顯然就是所期望的那樣。
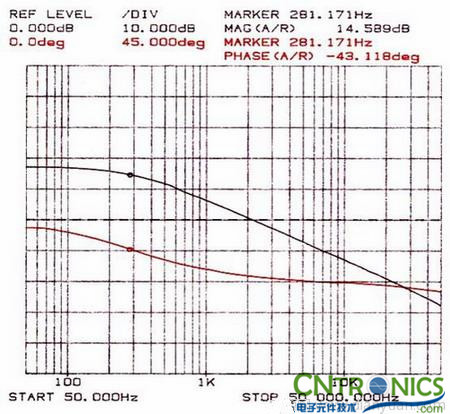
圖2:ECM信號行為圖。
利用干凈的、具有寬工作范圍的、單極點控制架構,最終用戶擁有利用這種便于補償的特點的靈活性,這一點是有趣的。用戶可以采用大約在300Hz的一個零點來實現非常簡單的、顯性的極點補償。該設計容許從1KHz遠至30KHz之間的某個頻點出現交叉頻率,因為這是簡單的RC補償。正是該控制架構的寬容特性才得以維持環路設計的簡單性。
[page]
把ECM降低至切合實際
LM5576家族的SIMPLE SWITCHER降壓調整器就是利用這種簡便的補償特性,通過可達到的環路補償把一定程度的控制能力返回給用戶,相比之下,以前版本的SIMPLE SWITCHER調整器完全依賴于內部的、工廠預先編程的增益特性。
當然,為了真正利用環路增益的靈活性,工作頻率也應該是靈活的。這就容許用戶在效率、解決方案的尺寸以及動態性能之間做出性能折中。例如,如果用戶要求極佳的動態性能,而效率卻是次要考慮,那么,設計工程師可以選擇運行在比較高的時鐘頻率,因此,把LC濾波器中存儲的能量最小化,并容許得到更好的瞬態響應。
相反,對于以加大一些電路板空間來獲得最優化效率的應用,用戶可以選擇較低的時鐘頻率,相關的LC濾波器就較大。歸因于濾波器單元中存儲的較大能量,動態性能會被打折。然而,在任何一種情形下,環路可以方便地針對選定的LC濾波器元器件以及時鐘頻率進行裁剪。對于具有很大級別的動態加載的系統,較快的控制環路準許減小輸出電容,因此,節省了整個設計的成本。
為了努力最小化用戶部分的設計工作量,整個調整器可以采用完全自動化的、著名的專家系統WEBENCH來設計。該軟件將生成確實穩定且達到預期功能的各種設計。然而,該軟件尚未智能到自己就足以把調整器的動態性能設計為最佳,那還需要少量的用戶介入。對于大多數應用來說,那是不必要的。
然而,對于那些在控制環路中需要少許額外帶寬的情形來說,用戶可以選擇調節補償。各種瞬態仿真的結果可以被觀察到,就像觀察整個環路增益的波特圖一樣,而由軟件選擇的補償可以被調節,以努力改善環路的動態性能。用戶可以自由地把環路帶寬推至遠遠高于工廠在傳輸函數中開始顯示的高頻率極點,因此,在稍微犧牲相位裕量的情況下,可以擴展環路帶寬,而瞬態動態性能得到了充分的改善。
為了迫使環路進入穩定狀態,對于電感器以及輸出電容的數值基本上沒有限制。在下面的例子中,開關頻率被提高至500KHz,從而容許電感器的數值為15uH,而電容器的數值為220uF。與簡單的、單片電路調整器相比,結果得到了一個看起來相當好的大負載階躍響應特性。
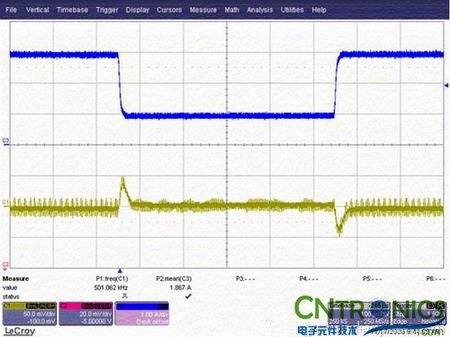
圖3:大負載階躍響應的實例。



