
【導(dǎo)讀】24 GHz硅基毫米波雷達(dá)技術(shù)正在實(shí)現(xiàn)新一代現(xiàn)實(shí)世界,越來越多地用于汽車、無人機(jī)、泛工業(yè)和消費(fèi)類應(yīng)用等大眾市場應(yīng)用的非接觸式智能傳感器。ADI的新型24 GHz雷達(dá)產(chǎn)品提供出色的性能和高集成度,是小尺寸、低成本且易用的超低功耗解決方案,適用于物理檢測、跟蹤、安全控制和防撞警告系統(tǒng)等應(yīng)用。
隨著新型射頻雷達(dá)傳感器應(yīng)用的出現(xiàn),許多希望快速完成雷達(dá)傳感器解決方案評(píng)估、設(shè)計(jì)和制造的公司面臨一系列新的開發(fā)挑戰(zhàn)。ADI的24 GHz雷達(dá)系統(tǒng)級(jí)原型解決方案(稱為DemoRAD)(圖1),可以在整個(gè)系統(tǒng)參考設(shè)計(jì)中實(shí)現(xiàn)硬件和軟件應(yīng)用開發(fā)。
圖1. 24 GHz DemoRAD平臺(tái)解決方案
24 GHz DemoRAD系統(tǒng)是一款新穎的微波雷達(dá)評(píng)估平臺(tái),提供開箱即用的軟件示例,可在數(shù)分鐘內(nèi)輕松啟動(dòng)雷達(dá)傳感器。DemoRAD可對(duì)雷達(dá)傳感器產(chǎn)品進(jìn)行快速原型制作,從而測量目標(biāo)/對(duì)象存在、運(yùn)動(dòng)、角位置、速度以及傳感器范圍等實(shí)時(shí)信息。
該系統(tǒng)硬件解決方案包括射頻天線和一條完整的射頻到基帶信號(hào)鏈(ADF5904(接收)、ADF5901(發(fā)射),ADF4159 (PLL),ADAR7251 (AFE)),其中還包括ADI的ADSP-BF707 DSP(數(shù)字信號(hào)處理器),可通過易用的圖形用戶界面和雷達(dá)算法軟件快速連接筆記本電腦/PC(圖2)。
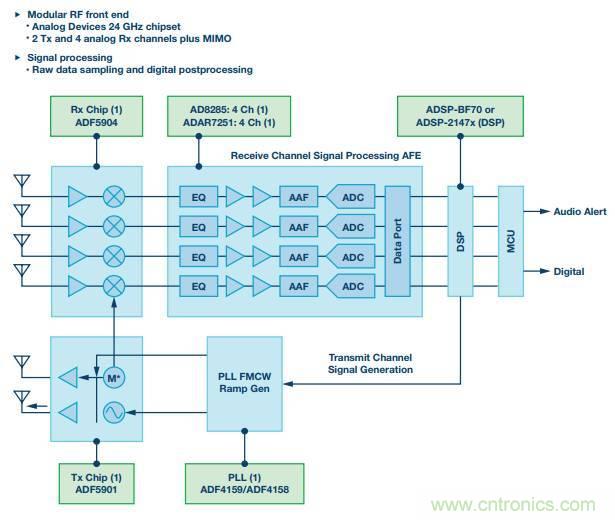
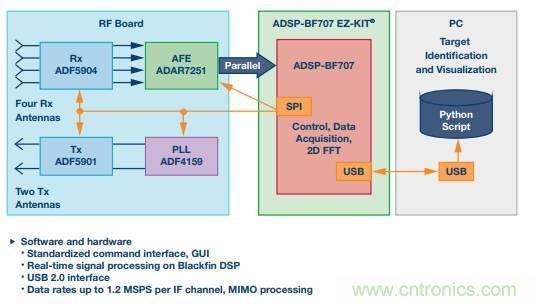
圖2. DemoRAD射頻到基帶信號(hào)鏈和簡化框圖
Blackfin® DSP庫中提供雷達(dá)FFT和控制固件。用戶只需幾分鐘就可將該平臺(tái)系統(tǒng)插入加載了軟件的計(jì)算機(jī)。使用軟件圖形用戶界面 (GUI) 提供全面的24 GHz雷達(dá)IC軟件支持,在DSP雷達(dá)支持功能庫中,通過一些額外功能可利用原始數(shù)據(jù),并使用為雷達(dá)傳感器設(shè)計(jì)的專用MATLAB® 工具(比如2D/3D 雷達(dá)FFT、CFAR和分類算法)在PC上進(jìn)行后處理。
FMCW雷達(dá)系統(tǒng)
基礎(chǔ)知識(shí)
圖3所示為雷達(dá)發(fā)射時(shí)產(chǎn)生的調(diào)頻連續(xù)波 (FMCW) 雷達(dá)波斜坡,以及用于定義雷達(dá)傳感器設(shè)計(jì)信息的一組重要雷達(dá)公式。
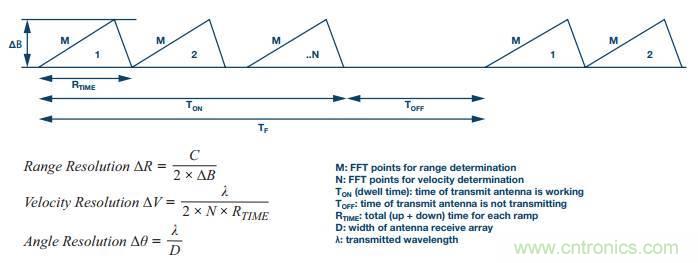
圖3. FMCW雷達(dá)概念
- 距離分辨率取決于發(fā)射載波掃描帶寬——發(fā)射掃描帶寬越高,雷達(dá)傳感器的距離速度越高。
- 速度分辨率取決于停留時(shí)間和載波頻率——載波頻率越高或停留時(shí)間越長,速度分辨率越高。
- 角分辨率取決于載波頻率——載波頻率越高,角分辨率越好。
圖4描述了對(duì)ADSP-BF707中捕獲的數(shù)據(jù)的后處理。
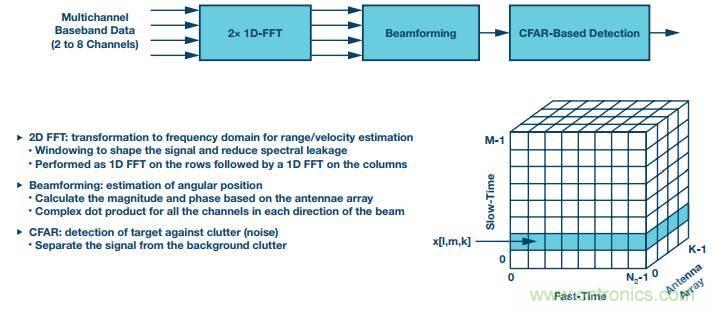
圖4. FMCW數(shù)字后處理信號(hào)鏈
DemoRAD系統(tǒng)信號(hào)鏈包括DSP中的一些基本算法,實(shí)施用于DSP FFT、波束成形和CFAR。基本目標(biāo)檢測和目標(biāo)分類在主機(jī)PC上運(yùn)行。DemoRAD主要用于采集時(shí)域和頻域中的雷達(dá)信號(hào)。DemoRAD不包括高級(jí)目標(biāo)檢測或?qū)ο蠓诸愃惴ā_@是應(yīng)用級(jí)開發(fā)工作的一個(gè)例子,通常由終端系統(tǒng)開發(fā)人員執(zhí)行,他們非常了解雷達(dá)傳感器的工作環(huán)境以及所需的對(duì)象檢測類型。
圖5所示為Blackfin ADSP-BF70x的部分優(yōu)化2D FFT,具有集成窗口功能,有助于避免飽和,實(shí)現(xiàn)更高的SNR,并優(yōu)化內(nèi)存布局,從而實(shí)現(xiàn)更高的帶寬和更高效的數(shù)據(jù)處理。DemoRAD提供不同的操作模式。
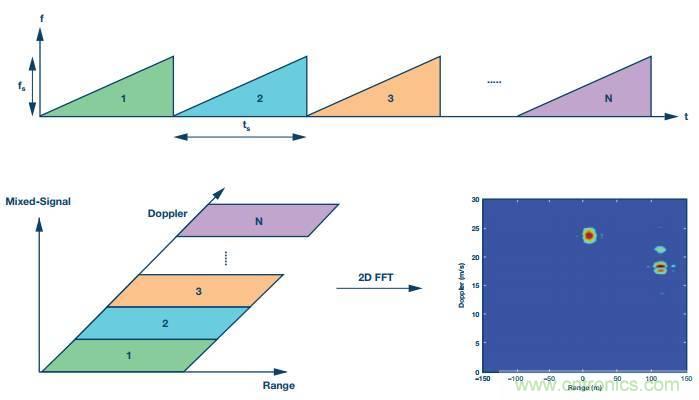
圖5. 使用二維傅里葉變換的距離和多普勒頻率
FMCW雷達(dá)
模式
在FMCW模式下,可以測量到靜止目標(biāo)的距離。目標(biāo)的下變頻接收信號(hào)的頻率與到該目標(biāo)的距離成比例。在GUI中,可以進(jìn)行FFT處理以確定頻率。使用距離-時(shí)間顯示選項(xiàng)可以查看移動(dòng)目標(biāo),同時(shí)顯示屏存儲(chǔ)多個(gè)FMCW掃描。
距離多普勒模式
在距離多普勒模式下,可以分析到目標(biāo)的距離以及速度。距離多普勒模式是最強(qiáng)大的操作模式之一,因?yàn)樗軌蛲ㄟ^評(píng)估二維傅里葉變換同時(shí)處理多個(gè)發(fā)射斜坡。距離多普勒處理數(shù)據(jù)顯示在距離多普勒?qǐng)D中。距離多普勒非常強(qiáng)大,因?yàn)樗试S分離具有不同速度的目標(biāo),即使這些目標(biāo)的距離都相同亦是如此。這對(duì)于不同方向上多個(gè)快速移動(dòng)的目標(biāo)非常有用——例如,解決汽車朝相反方向移動(dòng)或超車期間的復(fù)雜交通情況。
數(shù)字波束成形 (DBF) 模式
在DBF模式下,顯示到目標(biāo)的距離以及與該目標(biāo)所成的角度。來自四個(gè)接收通道的接收信號(hào)用于估計(jì)目標(biāo)的角度。顯示屏顯示xy平面中各目標(biāo)的空間分布。在DBF模式下,系統(tǒng)配置與FMCW模式下的相同,但對(duì)IF下變頻信號(hào)的處理不同。在計(jì)算距離之后,通過評(píng)估四個(gè)接收通道之間的相位差來計(jì)算目標(biāo)的角度信息。
在DBF模式下,需要進(jìn)行雷達(dá)前端系統(tǒng)校準(zhǔn),以消除接收通道之間不必要的確定性相位差。每個(gè)DemoRAD系統(tǒng)都具備工廠校準(zhǔn)數(shù)據(jù),在運(yùn)行GUI時(shí)加載。隨后會(huì)先校正采樣的IF信號(hào),再評(píng)估傳感器的測量數(shù)據(jù)。
DemoRAD平臺(tái)的MIMO操作原理是:使用ADF5901上兩個(gè)可用的發(fā)射輸出并放置相應(yīng)的天線。這樣會(huì)產(chǎn)生七個(gè)接收通道來提高傳感器的角分辨率——例如四個(gè)實(shí)際接收通道和四個(gè)虛擬接收通道,在一個(gè)通道上重疊。DemoRAD中使用的波形利用ADF4159 PLL的快速斜坡特性,其中上升線性調(diào)頻脈沖為280μs,下降線性調(diào)頻脈沖為4,總共為284μs。ADAR7251 AFE ADC以1 MSPS運(yùn)行的情況下,采集256個(gè)采樣或在上升沿中進(jìn)行數(shù)據(jù)采樣。
DemoRAD使用FMCW雷達(dá)監(jiān)測最遠(yuǎn)至200 米且分辨率約為75 cm的對(duì)象范圍和速度。根據(jù)天線陣列設(shè)計(jì),水平 (FOV) 方位角約為120°,俯仰角約為15°。通過組合數(shù)字波束成形 (DBF) 中的天線,DemoRAD使用DBF來計(jì)算FOV中的角度信息。
本文轉(zhuǎn)載自亞德諾半導(dǎo)體。
推薦閱讀:



