

【導讀】CCM(Continuous Conduction Mode),連續導通模式:在一個開關周期內,電感電流從不會到0。或者說電感從不“復位”,意味著在開關周期內電感磁通從不回到0,功率管閉合時,線圈中還有電流流過。
Buck開關型調整器
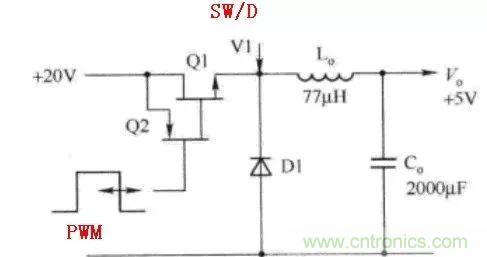
圖1
CCM及DCM定義
1)CCM(Continuous Conduction Mode),連續導通模式:在一個開關周期內,電感電流從不會到0。或者說電感從不“復位”,意味著在開關周期內電感磁通從不回到0,功率管閉合時,線圈中還有電流流過。
2)DCM,(Discontinuous Conduction Mode),斷續導通模式:在開關周期內,電感電流總會到0,意味著電感被適當地“復位”,即功率開關閉合時,電感電流為零。
3)BCM(Boundary Conduction Mode),臨界導通模式:控制器監控電感電流,一旦檢測到電流等于0,功率開關立即閉合。控制器總是等電感電流“復位”來激活開關。如果電感值電流高,而截至斜坡相當平,則開關周期延長,因此,BCM變化器是可變頻率系統。
圖2通過電感電流曲線表示了三種不同的工作模式。
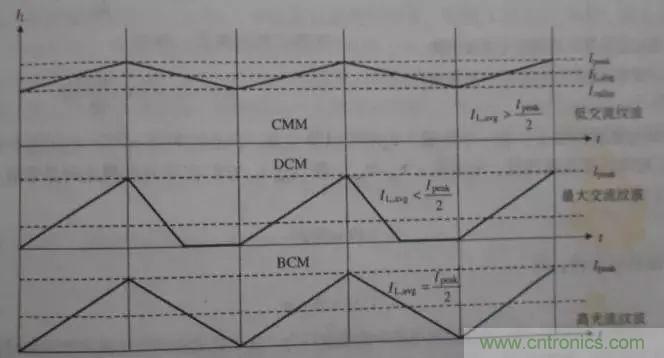
圖2 電感工作的三種模式:CCM/DCM/BCM
電流斜坡的中點幅值等于直流輸出電流Io的平均值,峰值電流Ip與谷值電流Iv之差為紋波電流。
CCM工作模式及特點
根據CCM定義,測試出降壓變換器工作于連續模式下的波形,如下圖3所示。
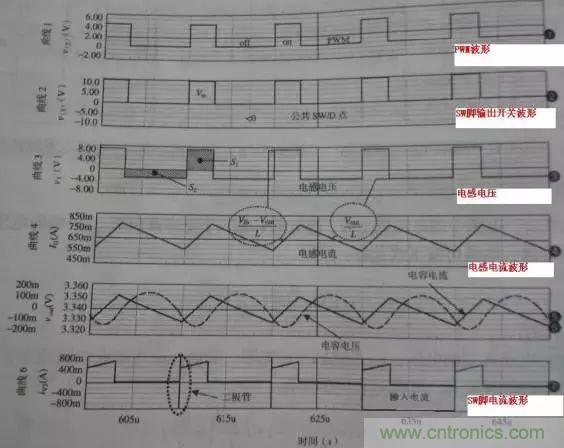
圖3
波形1表示PWM圖形,將開關觸發成導通和截止。當開關SW導通時,公共點SW/D上的電壓為Vin。相反,當開關斷開時,公共點SW/D電壓將擺到負,此時電感電流對二極管D提供偏置電流,出現負降壓——續流作用。
波形3描述了電感兩端電壓的變化。在平衡點,電感L兩端的平均電壓為0,及S1+S2=0。S1面積對應于開關導通時電壓與時間的乘積,S2面積對應于開關關斷時電壓與時間的乘積。S1簡單地用矩形高度(Vin-Vout)乘以D,而S2也是矩形高度-Voutt乘以(1-D)Tsw。如果對S1和S2求和,然后再整個周期Tsw內平均,得到:
化簡上式可以到CCM的降壓DC傳遞函數:
從上式可以看到Vout是隨D(占空比)變化的。
其實我們再看上面最后一個波形,在開關的閉合的時候,SW/D點電流波形有個很大的尖峰,用電壓芯片ACT4065及ACT4065A實際測得的電壓波形如圖4、圖5所示,具體原因有以下兩個方面。

第一、因為在開關閉合,將Vin作用到二極管的陰極,突然中斷了二極管的導通周期。對于PN二極管,首先需要將正向導通時PN結變回到電中性時的PN結,移去所有的少數載流子。二極管除去所有的注入電荷需要一定的時間才能恢復到它的斷開狀態,在完全恢復之前,它呈現短路行為。對于肖特基二極管,有金屬半導體硅結,它沒有恢復效應,然而,有很大的寄生電容,也有結電容。當二極管導通,一旦放電,SW很快通過放電電容作用電壓Vin,產生電流尖峰。所以減緩閉合開關SW時間將會有助于降低尖峰電流。
第二、與電流形狀有關。從圖像中可以看到輸出紋波(電容電流波形)很小。輸出紋波很平滑,“無脈沖”。意味著輸出電流信號能很好地為后續電路所接受,即電源中污染較小。另外,輸入電流不僅有尖峰,而且看上去像方波。如果電感L的值趨于無窮大,輸入電流的波形就是實實在在的方波。因此,該電流是“脈動”電流,包含大量的污染分量,比一般的正弦形狀的電流更難濾波。
方波:由正弦波的奇次諧波組成,也就是由正弦1,3,5,7...n等頻率組成。
對于開關關斷的瞬間也有尖峰產生,我覺得應該也是與二極管及SW腳的寄生電容及結電容有關。
通過以上可以總結出CCM降壓變化器的特點:
1)D限定在小于1,降壓變換器的輸出電壓始終小于輸入電壓;
2)如果忽略各種歐姆損耗, 變換系數M與負載電流無關;
3)通過變化占空比D,可以控制輸出電壓;
4)降壓變換器工作于CCM,會帶來附加損耗。因為續流二極管反向恢復電荷需要時間來消耗,這對于功率開關管而言,是附加的損耗負擔;
5)輸出沒有脈沖紋波,但是有脈沖輸入電流。
DCM工作模式及相關特點
開關器件在負載電流較大的時都是工作CCM模式,但當隨著負載電流下降,紋波電流將整體下降,如圖2所示,當負載電流減小到諧波峰峰值一半時,即Io=(Ip-Iv)/2,斜坡的最低點正好降到零,在這個最低點,電感電流為零,電感儲能為零。如果電感負載電流進一步減小,電感將進入DCM工作模式,電壓和電流波形將發生很大的變化如下圖6所示,以及傳遞函數將發生很大的變化。
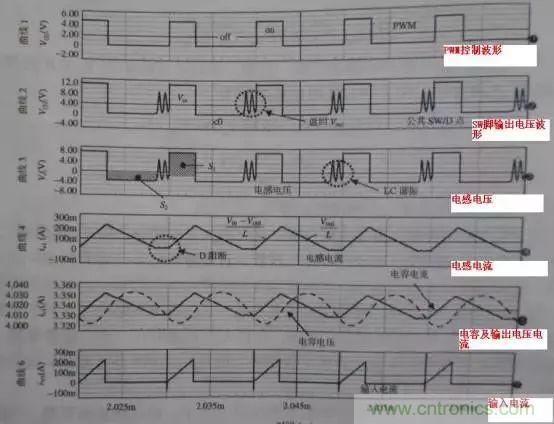
圖6
從波形4,可以看到電感電流下降到0,引起續流二極管截止。如果出現此情況,電感左端開路。理論上,電感左端的電壓應該回到Vout,因為電感L不再有電流,不產生振蕩。但是由于周圍存在很多寄生電容,如二極管和SW的寄生電容,形成了振蕩回路。如曲線2和曲線3,出現正弦信號,并在幾個周期后消失,這與電阻阻尼有關。但是在實際測試中可能還是有差別的,比如我在ACT4065A測試中,測試SW/D的波形,振蕩卻在中間,如下圖7所示,這是在DCM模式。
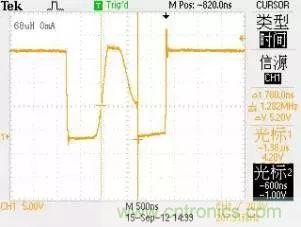
圖7
Buck變壓器在整個負載范圍內都將輸出電壓控制在一個定值,即使電感進入不連續工作模式。因此很容易會讓我們產生誤區,認為電感進入不連續工作模式對電路工作沒有影響。實際上,整個電路的傳遞函數已經發生變化,控制環路必須適應這種變化。
對于Buck調整器,電感進入不連續工作模式也沒什么問題。在進入不連續模式之前,直流輸出電壓Vout=Vin·Ton/T。注意到此公式與負載電流參數無關,所以當負載變化的時,不需調節占空比D,輸出電壓仍保持恒定。實際上,當輸出電流變化時,導通時間也會稍微變化,因為Q1的導通壓降和電感電阻隨著電流的變化而略有變化,這需要Ton做出適當的調整。
進入DCM工作后,傳遞函數將發生改變,CCM的傳遞函數將不再適用,開關管的導通時間將隨著直流輸出電流的減小而減小。下面是DCM工作模式下的傳遞函數,占空比與負載電流有關,即:
因為控制環路要控制輸出電壓恒定,負載電阻R與負載電流成反比關系。假設Vout,Vin,L,T恒定,為了控制電壓恒定,占空比必須隨著負載電流的變化而變化。
在臨界轉換電流處,傳遞函數從CCM轉變為DCM。工作CCM時,占空比保持恒定,不隨負載電流而改變;工作于DCM時,占空比隨負載電流減小而改變。
通過以上可以總結出DCM降壓變換器的特點:
1)M依賴于負載電流;
2)對于想通的占空比,DCM下的傳遞系數M比CCM大在負載電流低工作于深度DCM,M容易達到1。
CCM與DCM比較
1)工作于DCM模式,能降低功耗的,DCM模式的轉換效率更高些,屬于能量完全轉換;
2)工作于DCM模式,輸出電流的紋波比CCM大;
3)工作于DCM模式,在電感電流為0的時候,會產生振蕩現象;
4)工作于CCM模式,輸出電壓與負載電流無關,當工作于DCM模式,輸出電壓受負載影響,為了控制電壓恒定,占空比必須隨著負載電流的變化而變化。
推薦閱讀:



