

- 超聲波測距原理
- 硬件電路設計
- 超聲波發射電路設計
- 超聲波接收電路設計
- 溫度測量電路設計
- 顯示報警電路設計
1 引言
近年來,隨著汽車產業的迅速發展和人們生活水平的不斷提高,我國的汽車數量正逐年增加。同時汽車駕駛人員中非職業汽車駕駛人員的比例也逐年增加。在公路、街道、停車場、車庫等擁擠、狹窄的地方倒車時,駕駛員既要前瞻,又要后顧,稍微不小心就會發生追尾事故。據相關調查統計,15%的汽車碰撞事故是因倒車時汽車的后視能力不良造成的。因此。增加汽車的后視能力,研制汽車后部探測障礙物的倒車雷達便成為近些年來的研究熱點。安全避免障礙物的前提是快速、準確地測量障礙物與汽車之間的距離。為此,設計了以單片機為核心,利用超聲波實現無接觸測距的倒車雷達系統。
2整體設計及原理
超聲波一般指頻率在20 kHz以上的機械波,具有穿透性強,衰減小,反射能力強等特點。工作時,超聲波發射器不斷發射出一系列連續脈沖,給測量邏輯電路提供一個短脈沖。最后由信號處理裝置對接收的信號依據時間差進行處理,自動計算出車與障礙物之間的距離。超聲波測距原理簡單,成本低,制作方便,但其傳輸速度受天氣影響較大,不能精確測距;另外,超聲波能量與距離的平方成正比衰減,因此,距離越遠,靈敏度越低,從而使超聲波測距方式只適用于較短距離。目前,國內外一般的超聲波測距儀,其理想的測量距離
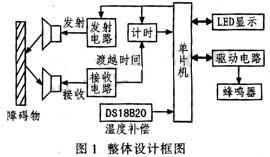
為4~5 m,因此大都用于汽車倒車雷達等近距離測距中。該倒車雷達系統采用單片機控制,如圖1所示。利用超聲波實現無接觸測距,并考慮測量環境溫度對超聲波波速的影響,而且通過溫度補償法對速度進行校正。使用由集成數字傳感器DS18B20構成的溫度測量電路,可直接讀取溫度值,再根據溫度補償得出超聲波在某一溫度下的波速,由單片機計數脈沖個數獲得傳播時間,根據超聲波測距原理測得并顯示距離,再根據顯示的距離控制蜂鳴器的發聲頻率。
2.1超聲波測距原理
目前,利用超聲波測距的方法有相位檢測法、聲波幅值檢測法、渡越時間檢測法三種。相位檢測的精度高,但檢測范圍有限;聲波幅值檢測易受反射波的影響;渡越時間檢測工作方式簡單、直觀,在硬件控制和軟件設計容易實現,其原理是檢測從發射傳感器發射超聲波到經氣體介質傳播后接收傳感器接收超聲波的時間差,即渡越時間t。距離s=ct/2(c為聲速),t可由單片機計脈沖個數的方法實現。
2.2溫度與聲速的關系
由于超聲波也是一種聲波,其聲速v與溫度T有關。表1列出了幾種不同溫度下的聲速。使用時,若溫度變化不大,則可視聲速基本不變;若測距精度要求很高,則應通過溫度補償法予以校正。

一般情況下,利用v=331+0.60T進行溫度補償,以適應不同溫度下的工作要求。表2給出補償后聲速與溫度的關系。可以看出,0℃以下時聲速值完全吻合;0℃以上最大誤差不超過5%。

由上述分析可知,溫度測量的精度不僅直接影響了速度的測量精度,而且也間接影響距離的測量精度,所以溫度的測量很關鍵。
3硬件電路設計
倒車雷達系統主要由超聲波發射電路、超聲波接收電路、溫度測量電路及顯示報警電路構成。
3.1超聲波發射電路
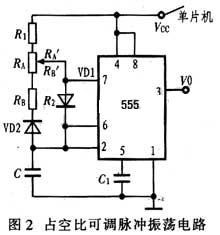
在單片機控制下,使脈沖發生器輸出超聲波。脈沖發生器由555構成,其連接如圖2所示。7引腳和6、2引腳的上下為R和C;中間R與RP并聯,RA=Rl+RA'''''''',RA=R2+RB'''''''',且T1=0.693RAC,T2=0.693RBC,通過調節RA和RB的阻值,實現輸出波形的占空比的可調。但是,這里需要50%占空比的方波,因此調節滑動變阻器,使T1=T2,頻率的計算公式為:
f=1.443/(RA+RB)C (1)
合理選擇R,C可使超聲波獲得40 kHz的輸出脈沖。因為超聲波的傳輸要有一段距離,為了使信號便于傳輸,通常要在發射電路的后面加上一個調制電路。[page]
3.2超聲波接收電路
因為超聲波測距只用于近距離,當距離較遠時,衰減較為嚴重,反射回來的信號相對也比較微弱,因此接收端應先設置一個放大電路,然后通過檢波電路對其輸出信號進行解調,最后對檢波輸出信號進行比較整形。
超聲波接收電路的需要考慮以下幾個方面:
(1)環境噪聲、干擾、溫度等影響
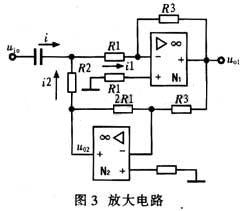
圖 3給出放大電路圖。它選擇一個自舉組合電路,該電路通過減小向輸入回路索取的電流來提高輸入阻抗,其值為Rin=R1R2/(R1-R2),該值可根據前序電路確定R1和R2,使其與前序電路級間匹配。電路中用到的是反相比例放大電路,增益比較穩定,通常K=-R3/R1不會引起自激,可降低干擾對電路的影響。因此,合理地選擇R3和R1,可使輸出電壓達到V級。
(2)檢波精度
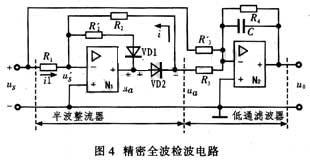
設計中采用了圖4所示的全波精密檢波電路。為了提高電路的信噪比,衰減掉不需要的頻率信號,在輸人端加上諧振回路。二極管VD1和VD2選擇高頻性能比較好的IN60。這種檢波方式可以使二極管的死區電壓和非線性得到很大的改善。
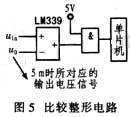
(3)比較整形電路
圖 5示出比較整形電路。首先在靜態下測量距離等于5 m,檢波器的輸出電壓值(該電壓同樣是經過放大檢波電路得到的),并以此電壓值作為比較器的參考電壓uR。比較器選用LM339,具有失調電壓小,電源電壓范圍寬,其單電源電壓為2~36 V,雙電源電壓為±1~±18 V,而且對比較信號源的內阻限制較寬等優點。對于LM339來說,當兩個輸入端電壓差大于10 mV時,就能確保其輸出從一種狀態可靠地轉換到另一種狀態。因此,把LM339用在弱信號檢測等場合是比較理想的。一般情況下,比較電路的輸出波形的上升沿和下降沿都有延時,可在其后面加一個與門,以改善輸出特性。將比較整形電骼的輸出送到單片機,對脈沖計數,得到渡越時間。單片機選AT89C52。
3.3溫度測量電路
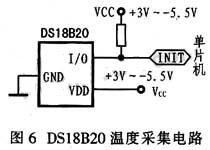
目前,大多數溫度測控系統在檢測溫度時,都采用溫度傳感器將溫度轉化為電量,經信號放大電路放大到適當的范圍,再由A/D轉換器轉換成數字量來完成。這種電路結構復雜,調試繁雜,精度易受元器件參數的影響。為此,利用一線性數字溫度計即集成溫度傳感器DS18B20 和單片機,構成一個高精度的數字溫度檢測系統。DS18B20數字式溫度傳感器與傳統的熱敏電阻溫度傳感器不同,能夠直接讀出被測溫度值,并且可根據實際要求,通過簡單的編程,實現9~12位的 A/D轉換。因而,使用DS18B20可使系統結構更簡單,同時可靠性更高。溫度測量范圍從-55~+125℃,在-10~+85℃檢測誤差不超過 0.5℃,而在整個溫度測量范圍內具有±2℃的測量精度,其電路連接如圖6所示。
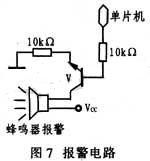
3.4顯示及報警電路
顯示電路采用4位共陽LED數碼管,碼段由74LS244驅動電路驅動;驅動電路由PNP晶體管8550驅動。圖7給出報警電路。它采用晶體管驅動。
4結語
該倒車雷達系統利用超聲波實現了無接觸測距;采用高精度溫度傳感器實現了對超聲波測距系統的溫度測量和補償,即根據v=331+0.60T,對聲速進行了補償,提高了測量精度。具有電路設計簡單,價格便宜,測量精度比較高的優點,目前已批量生產。




