

【導(dǎo)讀】本設(shè)計(jì)主要研究基于WIFI網(wǎng)絡(luò)的可視化無(wú)線遙控搬運(yùn)機(jī)器人,利用WIFI網(wǎng)絡(luò)高速傳輸實(shí)時(shí)視頻圖像采集,通過(guò)機(jī)器人安裝的傳感器實(shí)現(xiàn)數(shù)據(jù)采集。采用WIFI網(wǎng)絡(luò)通訊使得控制端多樣化,可用手機(jī),電腦等具備WIFI功能的設(shè)備進(jìn)行控制。這里主要講解可視化WIFI遙控搬運(yùn)機(jī)器人之服務(wù)器搭建。
本設(shè)計(jì)主要研究基于WIFI網(wǎng)絡(luò)的可視化無(wú)線遙控搬運(yùn)機(jī)器人,利用WIFI網(wǎng)絡(luò)高速傳輸實(shí)時(shí)視頻圖像采集,通過(guò)機(jī)器人安裝的傳感器實(shí)現(xiàn)數(shù)據(jù)采集。采用WIFI網(wǎng)絡(luò)通訊使得控制端多樣化,可用手機(jī),電腦等具備WIFI功能的設(shè)備進(jìn)行控制。此外,還可將機(jī)器人接入Internet實(shí)現(xiàn)更遠(yuǎn)距離的控制。本設(shè)計(jì)在S3C6410平臺(tái)上移植了Linux操作系統(tǒng)用于接收命令并對(duì)硬件設(shè)備進(jìn)行控制,其中移植了MJPGstreamer作為視頻服務(wù)器,移植了BOA服務(wù)器作為WEB服務(wù)器。本文將從硬件設(shè)計(jì),驅(qū)動(dòng)程序編寫(xiě),服務(wù)器移植,服務(wù)程序編寫(xiě),Android應(yīng)用程序編寫(xiě),Web應(yīng)用程序編寫(xiě)等方面來(lái)講述本設(shè)計(jì)的功能實(shí)現(xiàn)。
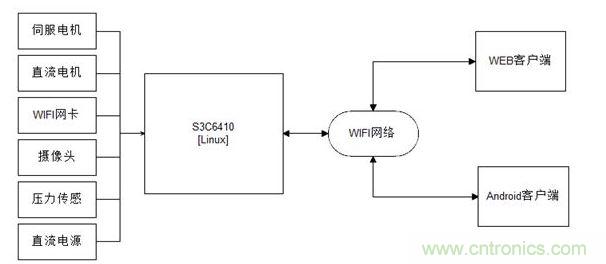
功能框圖
總體設(shè)計(jì)及硬件選型和電路部分:可視化WIFI遙控搬運(yùn)機(jī)器人(1):硬件部分
3 服務(wù)器搭建
3.1 服務(wù)器端功能框圖
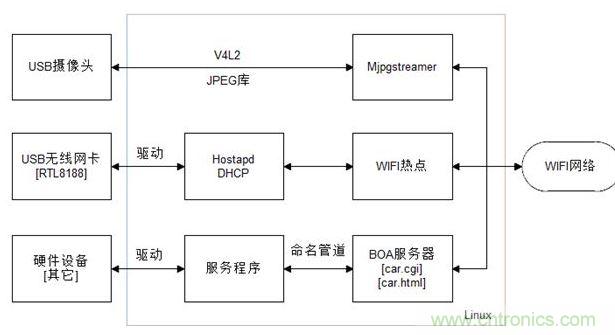
圖3-1 服務(wù)器端功能框圖
3.2 Linux系統(tǒng)移植
核心板采用友善之臂公司提供的TINY6410,此核心板已提供Bootloader,Linux系統(tǒng),文件系統(tǒng)。使用時(shí)只需要根據(jù)實(shí)際的需要裁減Linux系統(tǒng)即可,本設(shè)計(jì)采用的Linux內(nèi)核版本為L(zhǎng)inux2.6.38,編譯平臺(tái)為Ubuntu12.04,交叉編譯器為arm-linux-gcc-4.5.1。
3.3 驅(qū)動(dòng)編寫(xiě)與移植
3.3.1 直流電機(jī)驅(qū)動(dòng)
由于S3C6410只帶有2路PWM輸出,而夾持器部分需要兩路PWM脈寬調(diào)制控制伺服舵機(jī),因此直流電機(jī)部分采用定時(shí)器2來(lái)模擬PWM調(diào)制。設(shè)置定時(shí)器2每100ms進(jìn)一次中斷,在定時(shí)器中進(jìn)行1~100計(jì)數(shù),因此PWM周期為10S,并有100個(gè)脈寬比可調(diào),滿足直流電機(jī)調(diào)速控制。
[page]
3.3.2 伺服電機(jī)驅(qū)動(dòng)
伺服電機(jī)需要采用脈寬調(diào)制,通過(guò)調(diào)節(jié)20ms周期內(nèi)的占空比可以指定伺服電機(jī)的旋轉(zhuǎn)角度,其對(duì)應(yīng)關(guān)系如下表:
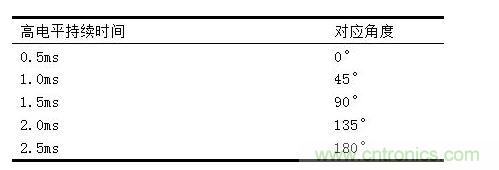
表3-1 伺服電機(jī)占空比與旋轉(zhuǎn)角度的對(duì)應(yīng)關(guān)系
由于舵機(jī)的控制要求較高,本設(shè)計(jì)采用S3C6410自帶的PWM進(jìn)行控制.。設(shè)置PWM0和PWM1的周期為20ms,通過(guò)調(diào)節(jié)PWM0和PWM1的占空比來(lái)控制伺服電機(jī)進(jìn)行工作。
3.3.3 攝像頭驅(qū)動(dòng)
ZC301為免驅(qū)的UVC視頻設(shè)備,為了實(shí)現(xiàn)視頻的采集需要在編譯內(nèi)核時(shí)選擇上V4L2支持。
3.3.4 USB WIFI 驅(qū)動(dòng)
本設(shè)計(jì)中采用的這款USB無(wú)線網(wǎng)卡采用RTL8188芯片,為使該設(shè)備能夠正常工作需要進(jìn)行驅(qū)動(dòng)程序移植。
①?gòu)腞TL官網(wǎng)獲得RTL8188的最新驅(qū)動(dòng)程序,本文采用的是RTL819xSU_usb_linux_v2.6.6.0.20120405.tar.gz。
②在Ubuntu中利用命令tar -zxvf 將驅(qū)動(dòng)包解壓。
③進(jìn)入驅(qū)動(dòng)目錄并修改Makefile
④由于驅(qū)動(dòng)默認(rèn)移植平臺(tái)是I386_PC,而我們需要將其移植到S3C平臺(tái)上,故需要做如下修改:
說(shuō)明目標(biāo)平臺(tái):
將:CONFIG_PLATFORM_I386_PC = y
改為:CONFIG_PLATFORM_I386_PC = n
將:CONFIG_PLATFORM_ARM_S3C = n
改為:CONFIG_PLATFORM_ARM_S3C = y
指定交叉編譯器以及內(nèi)核路徑信息:
ifeq ($(CONFIG_PLATFORM_ARM_S3C), y)
EXTRA_CFLAGS += -DCONFIG_LITTLE_ENDIAN
ARCH := arm
CROSS_COMPILE := /opt/FriendlyARM/toolschain/4.5.1/bin/arm-linux-
KVER := 2.6.48_$(ARCH)
KSRC := /root/tiny6410/linux-2.6.38
Endif
⑤執(zhí)行Make命令得到8712u.ko即為所需驅(qū)動(dòng),將該文件移動(dòng)到目標(biāo)平臺(tái)加載即完成了USB WIFI驅(qū)動(dòng)程序的移植。
3.3.5 ADC驅(qū)動(dòng)
電源電量以及FSR壓力傳感器數(shù)據(jù)測(cè)量需要ADC驅(qū)動(dòng)的支持。由于系統(tǒng)中已含有該驅(qū)動(dòng),故只需要在編譯內(nèi)核時(shí)選擇上即可。
3.4 AP熱點(diǎn)搭建
3.4.1 AP熱點(diǎn)簡(jiǎn)介
AP是(Wireless) Access Point的縮寫(xiě),即(無(wú)線)訪問(wèn)接入點(diǎn)。無(wú)線設(shè)備可以通過(guò)它來(lái)接入到無(wú)線網(wǎng)絡(luò)。RTL8188支持AP熱點(diǎn)模式,采用這種方式可以讓機(jī)器人成為AP熱點(diǎn),然后用帶WIFI功能的設(shè)備來(lái)進(jìn)行連接。
3.4.2 Hostapd簡(jiǎn)介
Hostapd即Host Access Point,其是Linux系統(tǒng)中無(wú)線訪問(wèn)接入點(diǎn)的守護(hù)進(jìn)程。它可以將無(wú)線網(wǎng)卡設(shè)置為AP模式,并且支持多種加密方式,提供了設(shè)備接入的身份驗(yàn)證。在實(shí)際的使用期間,我們需要對(duì)其配置文件進(jìn)行相應(yīng)的修改。本設(shè)計(jì)中采用Hostapd來(lái)結(jié)合RTL8188網(wǎng)卡完成AP熱點(diǎn)的搭建。
[page]
3.4.3 DHCP簡(jiǎn)介
DHCP(Dynamic Host Configuration Protocol)是一種動(dòng)態(tài)主機(jī)配置協(xié)議。它主要采用UDP協(xié)議來(lái)為接入到網(wǎng)絡(luò)中的設(shè)備分配IP地址以及進(jìn)行一些參數(shù)配置。本設(shè)計(jì)中通過(guò)配置其配置文件并啟用該服務(wù)來(lái)為接入機(jī)器人的WIFI設(shè)備分配IP地址,有效的避免了多個(gè)設(shè)備接入時(shí)的地址沖突問(wèn)題。
3.4.4 Hostapd移植
①下載最新版的Hostapd源碼,本文使用的是Hostapd-2.0。
②將hostapd-2.0.tar.gz進(jìn)行解壓,并進(jìn)入到hostapd目錄
③對(duì)目錄下的.config做如下修改:
注釋掉:
CONFIG_DRIVER_HOSTAP=y
CONFIG_DRIVER_WIRED=y
CONFIG_DRIVER_MADWIFI=y
取消下面這項(xiàng)的注釋:
CONFIG_DRIVER_NL80211=y
④修改Makefile 指定交叉編譯器:
CC=arm-linux-gcc
⑤執(zhí)行Make命令,編譯得到hostapd及hostapd_cli
⑥將編譯得到的可執(zhí)行文件復(fù)制到目標(biāo)平臺(tái),即完成了Hostapd的移植
⑦按需要更改hostapd.config文件,本設(shè)計(jì)關(guān)鍵部分配置如下:
interface=wlan0
ctrl_interface=/var/run/hostapd
ssid=CarControl
channel=6
wpa=2
wpa_passphrase=12345678
...
driver=rtl871xdrv
beacon_int=100
hw_mode=g
ieee80211n=1
wme_enabled=1
ht_capab=[SHORT-GI-20][SHORT-GI-40]
wpa_key_mgmt=WPA-PSK
wpa_pairwise=CCMP
max_num_sta=8
wpa_group_rekey=86400
⑧hostapd -B hostapd.config 啟動(dòng)Hostapd服務(wù)
3.4.5 DHCP移植
Linux2.6.38內(nèi)核中已含有DHCP支持,使用DHCP只需要修改DHCP配置文件udhcpd.conf,其中最關(guān)鍵部分如下:
# The start and end of the IP lease block
start 192.168.2.2
end 192.168.2.30
即修改了自動(dòng)分配IP地址的范圍,由于采用局域網(wǎng),需要將IP地址設(shè)置為同一網(wǎng)段,機(jī)器人采用的IP地址為192.168.2.1,因此將IP地址分配范圍作如上設(shè)置。啟動(dòng)hostapd后需要執(zhí)行udhcpd命令啟動(dòng)DHCP服務(wù),從而當(dāng)WIFI設(shè)備接入機(jī)器人時(shí)能自動(dòng)獲取到IP地址。
3.5 視頻服務(wù)器搭建
3.5.1 V4L2簡(jiǎn)介
V4L2(即Video for linux 2)是Linux 內(nèi)核中針對(duì)UVC免驅(qū)視頻設(shè)備的編程框架,它提供了一系列通用的接口來(lái)實(shí)現(xiàn)Linux中對(duì)視頻設(shè)備的訪問(wèn),其編程模式如下:
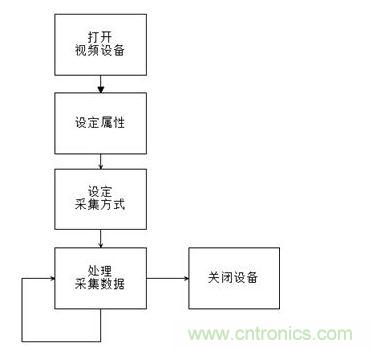
圖 3-2 V4L2編程模式
Linux2.6.38內(nèi)核中自帶了該驅(qū)動(dòng),在使用時(shí)只需要在編譯內(nèi)核時(shí)將V4L2選項(xiàng)勾選上即可。
[page]
3.5.2 LIBJPEG簡(jiǎn)介
Libjpeg是一個(gè)包含了JPEG圖像的編碼,解碼等功能的開(kāi)源庫(kù),其完全采用C語(yǔ)言來(lái)進(jìn)行編寫(xiě)。
3.5.3 Mjpgstreamer簡(jiǎn)介
MJPGstreamer是主要運(yùn)行在Linux系統(tǒng)上的一款運(yùn)用多線程技術(shù)的輕量級(jí)視頻服務(wù)器軟件。它是一款采用C語(yǔ)言進(jìn)行開(kāi)發(fā)的開(kāi)源軟件,其代碼簡(jiǎn)潔,注釋清晰,組件功能明確,銜接清晰,可以移植到不同的計(jì)算機(jī)平臺(tái)。整個(gè)程序主要以模塊化的方法來(lái)進(jìn)行構(gòu)建,每個(gè)功能模塊又被稱為組件(plug-in),用戶可以根據(jù)自己的需要來(lái)選擇輸入組件和輸出組件。它可以實(shí)現(xiàn)從一個(gè)單一的輸入組件獲取到圖像數(shù)據(jù)來(lái)通過(guò)多個(gè)輸出組件將圖像進(jìn)行輸出[ ]。下圖為Mjpgstreamer的組件:
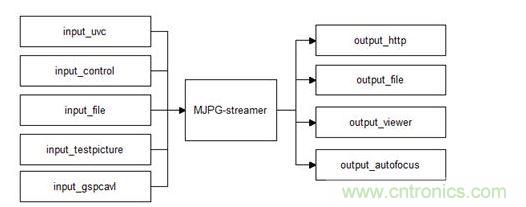
圖 3-3 MJPG-streamer組件
本設(shè)計(jì)選用input_uvc作為輸入組件來(lái)使用V4L2從攝像頭獲取圖像數(shù)據(jù),經(jīng)JPEG庫(kù)對(duì)數(shù)據(jù)進(jìn)行編碼之后,通過(guò)選用output_http作為輸出組件來(lái)輸出圖像數(shù)據(jù)。output_http組件實(shí)現(xiàn)了一個(gè)符合HTTP1.0標(biāo)準(zhǔn)的web服務(wù)器,用戶可以使用HTTP協(xié)議獲取視頻信息。
3.5.4 libjpeg移植
移植libjpeg庫(kù)主要是用于Mjpgstreamer采集數(shù)據(jù)時(shí)壓縮編碼,移植步驟如下:
①下載libjpeg源碼,本文采用jpeg-9a。
②將jpeg-9a.tar.gz解壓,并進(jìn)入源碼根目錄。
③執(zhí)行如下命令配置編譯,生成編譯時(shí)所需要的Makefile文件。
./configure --prefix=/root/h264/app/jpeg --exec-prefix=/root/h264/app/jpeg --enable-shared --enable-static
命令中prefix是最后安裝時(shí)庫(kù)存放的目錄,shared是編譯成動(dòng)態(tài)庫(kù),static是編譯成靜態(tài)庫(kù)。
④修改Makefile文件,指定編譯時(shí)所需要的交叉編譯工具和環(huán)境:
CC = arm-linux-gcc -std=gnu99
AR = arm-linux-ar
CPP = arm-linux-gcc -std=gnu99 -E
⑤執(zhí)行make命令編譯代碼
⑥執(zhí)行make install命令產(chǎn)生libjpeg庫(kù),存放于/root/h264/app/jpeg目錄下。
⑦將libjpeg庫(kù)移動(dòng)到目標(biāo)平臺(tái),完成libjpeg移植。
3.5.5 Mjpgstreamer移植
MJPGstreamer作為本設(shè)計(jì)中的視頻采集服務(wù)器,其移植過(guò)程如下:
①下載Mjpgstreamer源代碼,本設(shè)計(jì)采用mjpg-streamer-r63.tar.gz。
②解壓mjpg-streamer-r63.tar.gz,并進(jìn)入代碼根目錄。
③修改plugins/input_uvc/Makefile:
指定交叉編譯器:
CC = arm-linux-gcc
指定libjpeg庫(kù):
input_uvc.so: $(OTHER_HEADERS) input_uvc.c v4l2uvc.lo jpeg_utils.lo dynctrl.lo $(CC) $(CFLAGS) -ljpeg -L/root/h264/app/jpeglib/lib -o $@ input_uvc.c v4l2uvc.lo jpeg_utils.lo dynctrl.lo
④修改主目錄以及plugins目錄下所有子目錄的Makefile,指定交叉編譯器:
CC = arm-linux-gcc
⑤執(zhí)行make命令,生成可執(zhí)行文件mjpg_streamer。
⑥將源碼目錄中的start.sh和目錄www拷貝到目標(biāo)平臺(tái)完成Mjpgsteramer移植。
⑦執(zhí)行如下命令可啟用Mjpgstreamer服務(wù):
./mjpg_streamer -i "./input_uvc.so -r 320x240 -f 25 " -o "./output_http.so -w www"
命令中指定輸入組件為input_uvc,并且配置采集分辨率為320*240,幀數(shù)為25fps。指定輸入組件為output_http,并且http服務(wù)器目錄為www。
[page]
3.6 BOA服務(wù)器搭建
3.6.1 BOA服務(wù)器簡(jiǎn)介
由于Mjpgstreamer服務(wù)器只能傳輸視頻信息,而本設(shè)計(jì)需要接收客戶端的控制命令并且得返回機(jī)器人的傳感器數(shù)據(jù)。因此得移植支持CGI應(yīng)用腳本的服務(wù)器。BOA服務(wù)器是一個(gè)可運(yùn)行在unix或linux下的非常小巧的單任務(wù)Web服務(wù)器,并且支持CGI腳本,廣泛應(yīng)用于嵌入式領(lǐng)域[ ]。本設(shè)計(jì)通過(guò)編寫(xiě)CGI腳本來(lái)完成服務(wù)器與客戶端的數(shù)據(jù)交換。
3.6.2 BOA服務(wù)器移植
BOA服務(wù)器的移植需要以下步驟:
①下載BOA服務(wù)器源碼,本文采用boa-0.94.13.tar.gz。
②解壓boa-0.94.13.tar.gz,并進(jìn)入到源碼根目錄。
③執(zhí)行命令./configure生成Makefile文件。
④修改Makefile文件,指定編譯時(shí)所需要的交叉編譯器:
CC=gcc改成CC = arm-linux-gcc
CPP = gcc –E改成CPP = arm-linux-gcc –E
⑤執(zhí)行make命令生成boa可自行文件
⑥將boa以及boa.conf移動(dòng)到目標(biāo)平臺(tái),即可完成BOA服務(wù)器移植。
⑦為了適應(yīng)本設(shè)計(jì)的需求,得修改boa.conf文件來(lái)配置boa服務(wù)器。本設(shè)計(jì)作出如下修改:
Port 80
User root
Group root
ErrorLog /dev/console
AccessLog /dev/null
ServerName CarControl
DocumentRoot /www
DirectoryIndex index.html
KeepAliveMax 1000
KeepAliveTimeout 10
MimeTypes /etc/mime.types
DefaultType text/plain
CGIPath /bin
AddType application/x-httpd-cgi cgi
此配置設(shè)置了服務(wù)器的端口號(hào),權(quán)限,服務(wù)器目錄連接數(shù)等參數(shù)。
3.7 服務(wù)器端程序設(shè)計(jì)
3.7.1 CGI腳本簡(jiǎn)介
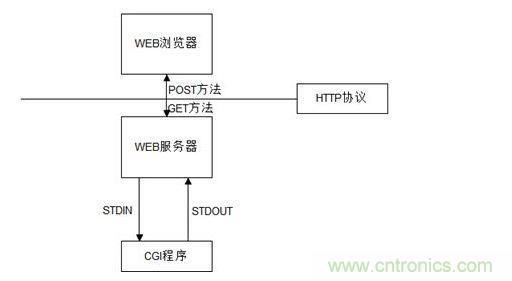
圖 3-4 CGI程序應(yīng)用原理
3.7.2 命名管道簡(jiǎn)介
命名管道是一種實(shí)現(xiàn)無(wú)關(guān)進(jìn)程間通信的通信機(jī)制(IPC)。其本質(zhì)上為一個(gè)文件,因此通訊更加穩(wěn)定。命名管道遵循與先進(jìn)先出原則,并且是半雙工的,數(shù)據(jù)只能單向傳輸,若要實(shí)現(xiàn)雙向傳輸就得使用兩個(gè)管道。命名管道含有讀端和寫(xiě)端,并且支持阻塞讀。本設(shè)計(jì)中利用命名管道的特性,可以實(shí)現(xiàn)CGI程序與命令服務(wù)程序之間的數(shù)據(jù)交換。
[page]
3.7.3 控制命令設(shè)計(jì)
本設(shè)計(jì)控制命令簡(jiǎn)單,因此客戶端與服務(wù)器間數(shù)據(jù)通訊主要采用HTTP GET方法,服務(wù)器CGI應(yīng)用程序可以在環(huán)境變量QUERY_STRING中獲取字符串形式的控制命令。本設(shè)計(jì)中采用“標(biāo)志+參數(shù)”的方式設(shè)置控制命令,單個(gè)命令字的總長(zhǎng)度為5字節(jié),具體如下:
直流電機(jī)控制指令:
L0000~0200
R0000~0200
其中L,R分別代表左和右,將此命令參數(shù)減去100,負(fù)數(shù)為后退,0為停止,正數(shù)為前進(jìn)。其絕對(duì)值越大速度越快。
伺服電機(jī)控制命令:
C0250~1250
S0250~1250
其中C,S分別代表夾持和旋轉(zhuǎn)命令,參數(shù)250~1250代表脈沖寬度用以調(diào)整伺服電機(jī)旋轉(zhuǎn)位置(0°~180°)。
獲取電量命令:
POWER
當(dāng)CGI接收到此命令時(shí)將會(huì)把電源的電壓值返回給客戶端。
數(shù)據(jù)返回格式如下:
POW:0~1023
PRE:0~1023
其中POW,PRE分別代表電量,壓力,參數(shù)0~1023為從ADC中采集到的數(shù)據(jù)。
3.7.4 CGI程序流程圖
CGI程序主要負(fù)責(zé)從客戶端獲得命令字然后通過(guò)命名管道將控制命令發(fā)送給服務(wù)程序進(jìn)行處理,并且調(diào)用驅(qū)動(dòng)程序讀取機(jī)器人傳感器數(shù)據(jù)信息返回給客戶端。CGI程序流程圖如下:
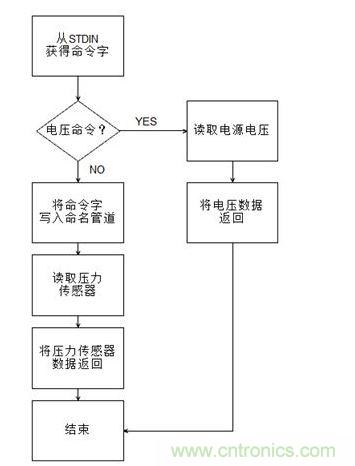
圖 3-5 CGI程序流程圖
如圖3-5所示,本設(shè)計(jì)的CGI腳步先判斷客戶端的命令是否為索取電壓值得命令,如果是的話就讀取電源電壓數(shù)據(jù)并將數(shù)據(jù)返回,否則就將命令字寫(xiě)入到命名管道供服務(wù)程序來(lái)進(jìn)行讀取,并且讀取壓力傳感器的數(shù)據(jù)將其返回給客戶端。
3.7.5 CGI程序編寫(xiě)
CGI腳本的部分代碼如下:
int main()
{
...
buff = getenv("QUERY_STRING");//獲得指令
sscanf(buff, "%s", cmd);
...
/*讀取電壓值,并返回給客戶端*/
if(strcmp(cmd,"POWER")==0)
{adc_fd=open("/dev/adc",0);//打開(kāi)ADC驅(qū)動(dòng)
if(adc_fd<0)
fprintf(stdout, "open adc_device failen");
else
{if(ioctl(adc_fd,ADC_SET_CHANNEL,0) < 0)
fprintf(stdout, "ioctl adc_device failen");
else{len = read(adc_fd, adc, 4);//讀取ADC
if (len > 0)
{adc[len] = ''''''''?'''''''';
fprintf(stdout, "POW:%s",adc);//將電壓值返回
}
}
close(adc_fd);
}
}
else
{
cmd_fd=open(FIFO_CMD,O_WRONLY|O_NONBLOCK,0);//與服務(wù)程序通過(guò)命名管道通訊
/* 向管道寫(xiě)入數(shù)據(jù) */
if((nwrite=write(cmd_fd,cmd,11))==-1)
fprintf(stdout, "write cmd failen");
close(cmd_fd);
/*讀取壓力值,并返回給客戶端*/
adc_fd=open("/dev/adc",0);//打開(kāi)ADC驅(qū)動(dòng)
if(adc_fd<0)
fprintf(stdout, "open adc_device failen");
else
{
if(ioctl(adc_fd,ADC_SET_CHANNEL,1) < 0)
fprintf(stdout, "ioctl adc_device failen");
else
{
len = read(adc_fd, adc, 4);//讀取ADC
if (len > 0)
{
adc[len] = ''''''''?'''''''';
fprintf(stdout, "PRE:%s",adc);//返回壓力值
}
}
close(adc_fd);
}
}
return 0;
}
[page]
3.7.6 服務(wù)程序流程圖
服務(wù)程序主要完成機(jī)器人初始化,讀取電量值并將電量值通過(guò)LED來(lái)進(jìn)行提示,讀取命名管道獲得命令字并將其解析執(zhí)行。主要的流程圖如下:
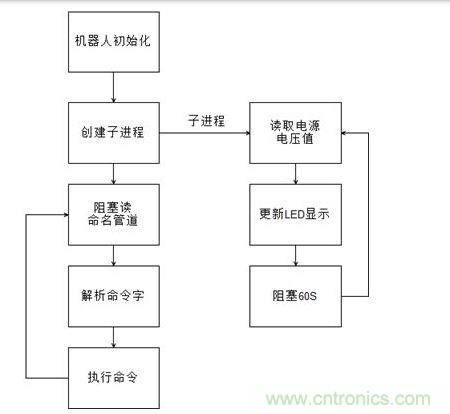
圖 3-6 服務(wù)程序流程圖
如圖3-6所示,本設(shè)計(jì)中的服務(wù)程序采用多進(jìn)程程序設(shè)計(jì)方式,其子進(jìn)程每60S采集一次電源電量信息并更新電量指示燈顯示,主進(jìn)程采用阻塞讀的方式讀取命名管道來(lái)等待客戶端發(fā)送命令,獲得命令之后對(duì)命令進(jìn)行解析并調(diào)用驅(qū)動(dòng)程序來(lái)執(zhí)行相應(yīng)的命令,從而實(shí)現(xiàn)對(duì)機(jī)器人的控制。
3.7.7 服務(wù)程序編寫(xiě)
服務(wù)程序部分代碼如下:
/* 創(chuàng)建子進(jìn)程,用于每60S獲取電源電壓值 */
if(fork()==0)
{
while(1)
{
if(ioctl(adc_fd,ADC_SET_CHANNEL,0) < 0)
{perror("ioctl ADC device:");
exit(1);
}
char buffer[5];
int len = read(adc_fd, buffer, sizeof buffer -1);//讀取ADC
if (len > 0)
{
buffer[len-1] = ''''''''?'''''''';
printf("POW VALUE:%sn",buffer);
getpower=(float)StrToInt(buffer);
getpower=9.9*getpower/1024.0;
if(power==0)
power=getpower;
if(getpower<=power && power-getpower<0.2)
{
power=getpower;
if(power>8.1)//根據(jù)電量來(lái)用LED顯示
Show(5);
...
}
}
sleep(60);//1min
}
}
/* 主進(jìn)程,用于獲取命令并處理 */
else{
while(1)
{
memset(buff,0,sizeof(buff));
cmd_fd=open(FIFO_CMD,O_RDONLY);//readonly 阻塞
if(cmd_fd==-1)
{
perror("open");
exit(1);
}
if((nbytes=read(cmd_fd,buff,sizeof(buff)))>4)//讀取FIFO_CMD管道
{
buff[nbytes]=''''''''?'''''''';
//指令處理
receive_do(buff);
}
close(cmd_fd);
}
}
上述代碼中receive_do函數(shù)主要負(fù)責(zé)解析命令,并進(jìn)行處理。其代碼如下:
void receive_do(char buffer[])
{
int c,i;
int tmp=0;
c = (int)(nbytes+1)/5;
for(i=0;i {
tmp=(buffer[1+i*5]-''''''''0'''''''')*1000+(buffer[2+i*5]-''''''''0'''''''')*100+(buffer[3+i*5]-''''''''0'''''''')*10+(buffer[4+i*5]-''''''''0'''''''');//解析接收到的指令數(shù)據(jù)
switch(buffer[i*5])//處理指令
{
case ''''''''L'''''''':ioctl(dc_fd,LEFT_SET,tmp);
break;
case ''''''''R'''''''':ioctl(dc_fd,RIGHT_SET,tmp);
break;
case ''''''''C'''''''':ioctl(servo_fd,CLAMP_SET,tmp);
break;
case ''''''''S'''''''':ioctl(servo_fd,SPIN_SET,tmp);
break;
}
}
}
CGI即公共網(wǎng)關(guān)接口(Common GatewayInterface)它是一種WWW技術(shù)。CGI實(shí)質(zhì)是運(yùn)行在WEB服務(wù)器上面為客戶端HTML頁(yè)面提供接口的一個(gè)腳本程序。它可以通過(guò)標(biāo)準(zhǔn)輸入(STDIN)來(lái)從WEB服務(wù)器獲得數(shù)據(jù),經(jīng)處理之后可以通過(guò)標(biāo)準(zhǔn)輸出(STDOUT)來(lái)將數(shù)據(jù)返回給WEB服務(wù)器,從而實(shí)現(xiàn)對(duì)客戶端數(shù)據(jù)的接收處理。本設(shè)計(jì)采用這種方式實(shí)現(xiàn)機(jī)器人控制命令的接收,以及返回機(jī)器人傳感器數(shù)據(jù)信息。CGI程序應(yīng)用原理如下圖所示:



