

【導讀】隨著CAN-bus相關芯片價格的下降,內置CAN控制器MCU的增多,CAN-bus當前已經進入了眾多早期由于成本問題無法使用的領域,成為極具生命力的現場總線,今天我們就來探討如何構建專屬自己的CAN-bus應用層協議。
在CAN-bus網絡上,CAN報文以廣播的形式發送,CAN報文不包含地址信息,是否處理接收到的CAN報文由接收點的軟件確定。CAN-bus只提供可靠的報文傳輸服務,CAN報文的使用由應用者定義, 所以CAN網絡中的節點要相互通信就必須制定一個統一的規則。CAN應用層協議就是這樣一個規則。
這個規則,定義了CAN報文中幀ID及幀數據的使用方式,如將幀ID定義為需要處理該幀數據的CAN節點地址等。根據應用場合的不同,國際上出現了多種CAN應用層協議,常見的CAN-bus應用層協議如下:
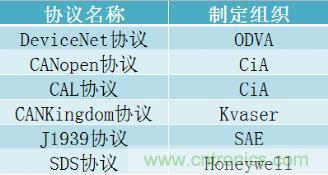
圖1
接下來,我們看一下如何構建CAN-bus應用層協議
l構建一個現場總線網絡,需要解決的關鍵技術問題有:
l總線傳輸信息的速度、容量、優先等級、節點容量等;
l高電磁干擾環境下的可靠數據傳輸;
l最大傳輸距離時延時大小的確定;
l網絡的容錯技術;
l網絡的監控和故障診斷功能。
要解決以上問題,需要充分考慮現場總線網絡所采用的總線類型,因為以上問題和總線的性能特點是密切相關的,那么我們就看一下CAN-bus總線的上述特性:
lCAN-bus網絡傳輸速度最高可達1Mbps,并采用無損仲裁,通過報文標識符指示報文優先級;
lCAN-bus采用差分信號傳輸,并采用可靠的數據校驗和錯誤檢測機制;
lCAN-bus采用幀傳輸,每個報文允許傳輸最多8個字節,幀結構有嚴格規定,能夠確定最大傳輸延時;
lCAN-bus具有可靠的錯誤機制和檢測機制,發送的信息遭到破壞后可以重新發送;節點在錯誤嚴重的情況下,具有自動退出總線的功能;
l可以通過制定嚴禁的CAN-bus應用層協議解決網絡監控和診斷。
CAN報文的分配
包含報文標識符的分配和報文數據的分配,報文格式的定義,實質是將CAN報文的分配規則進行詳細的描述。
報文ID的定義:
CAN2.0A幀:11位ID
CAN2.0B幀,29位ID
報文數據的定義:每幀報文最多包含8字節數據
CAN網絡數據通信的實現
在CAN網絡中,通過報文的標識符進行信息的區分,因此通過報文的各種標識符分配來達到建立信息鏈接的目的。
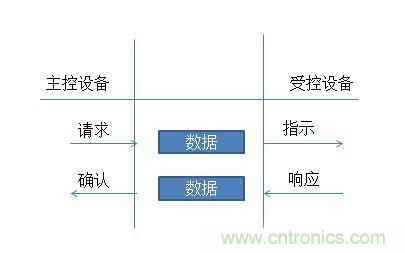
圖2.命令/響應模式通信
CAN應用層協議:面向節點和面向報文的協議
數據通信協議基本上可以劃分為“面向節點的協議”和“面向報文的協議”兩種類型,如下圖:

圖3.面向節點和面向報文的數據通信
制定一個CAN應用層協議
為了給讀者演示CAN應用層協議的開發和使用方法,下面定義一個簡單的CAN應用協議棧,該協議棧中只用到CAN標準幀中的數據幀,幀ID中的11個位的分配和使用方法如下表所列,協議中另外還定義了功能參數長度變量FunDataLen的功能參數數組FunData,該數組在需要時可以為某些特定功能函數提供足夠的控制參數。
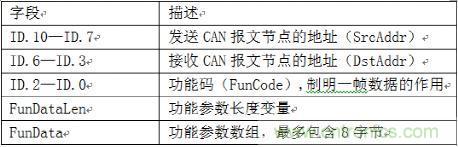
圖4



