

- 汽車內部傳感器網絡系統
- 汽車電子控制和調節裝備的變化
- 在傳感器模塊與ECU之間采用數字通信傳輸
- 制定和執行標準化數字接口
- 軟件錯誤檢測時采用臨時診斷DM
目前實現上述功能需要20~50個電子控制單元(ECU),所用到的傳感器差不多有70~150個。這些傳感器負責測量的環境數據范圍很廣,有壓力、溫度、流量、速度、加速度以及角度等。它們將測量值送到ECU進行引擎和環境控制、安全氣囊觸發,從而提升舒適度和安全性。像ABS、電子穩定程序/控制(ESP/ESC),以及剎車輔助系統等,都要依賴傳感器輸入。
在這些應用中,各種電子系統的自診斷能力正變得日益重要。例如,如果有可能直接在傳感元件中檢測到傳感器的缺陷,ECU就能夠獲得可靠數據從而做出正確決策。對于那些與安全息息相關的系統來說,系統禁用和應急啟動都相當重要。

圖1:如今汽車內的電子元器件價值已占到總車的15-20%。
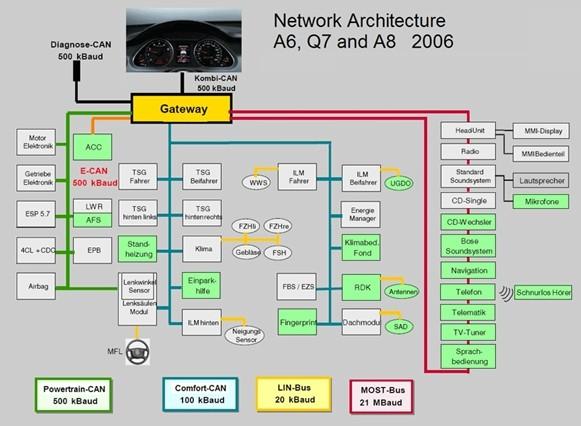
圖2:在現代車輛中,常常需要10到20條不同的數據總線將不同的裝配連接到一起。
作為網絡應用的汽車電子
一份有關汽車電子控制系統的分析報告顯示,這些裝配的復雜度呈現指數上升。簡單的電子控制和調節裝備已經被更為復雜的IT系統取代。在這其中,除了實際硬件外,軟件以及ECU間的雙向通信已成為一個新的關注點。
例如,可能會通過診斷用CAN總線來訪問每個單獨的ECU、詢問其狀態、讀取錯誤代碼,甚至刷新程序固件。如今,出于成本考慮,許多應用中常常會共享傳感器。這意味著一個傳感器模塊的測量值將被幾個ECU處理。
車輛中的大量應用已然轉變成了網絡應用。以往的常見架構(即一個ECU實現一個應用)已經被多個ECU共享的網絡功能所取代。
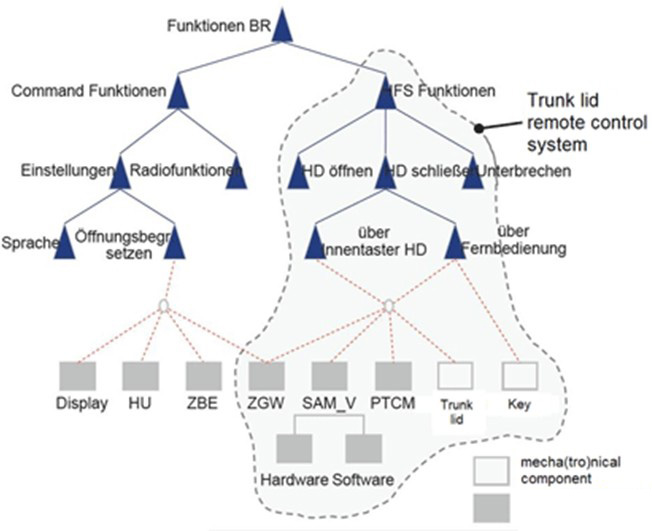
圖3:后備箱蓋功能樹。
圖3是一個后備箱蓋的工作功能樹。在這里,打開后備箱實際上需要激活兩個ECU裝置。其余的ECU用來執行顯示和控制等功能。
任何錯誤都會導致系統故障。打開后備箱蓋這個動作可能出現的錯誤模式有6個。應該是某個錯誤使得傳感器故障,這可能會在ECU的故障存儲器中產生十幾個不同的輸入。從這些錯誤代碼的分布來看,有必要獲取比以往更為詳細的傳感器診斷信息。[page]
汽車傳感器目前所用的通信協議仍然是模擬輸出。這是典型的點對點連接——即一個傳感器與一個ECU連接,并以電壓作為其輸出信號。盡管已經進行了一些改善,例如提高分辨率,或增加診斷范圍(LDR,UDR,見圖4),但模擬輸出仍然是90年代至今該技術的核心。
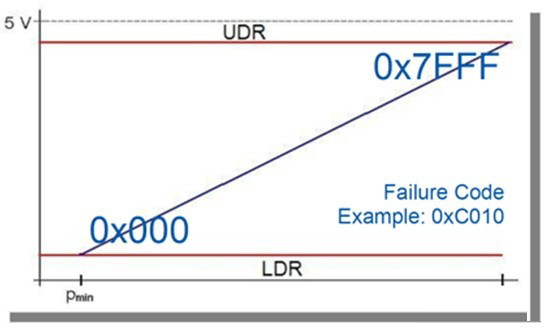
模擬輸出只允許進行信號范圍內(如10-90%)的傳感器信號傳輸,并通過開關將低診斷范圍(LDR)和高診斷范圍(UDR)轉換為故障狀態。因此,其無法傳送更詳細的故障信息。
解決這一問題的方法是在傳感器模塊與ECU之間采用數字通信,來傳輸除傳感器數據之外的狀態信息、時間戳以及誤差代碼等。不過遺憾的是,向數字通信轉變所引發的問題異常復雜,因為傳感器的種類相差太大,而且不同的傳感器供應商所采用的架構也有所不同(見圖5)。
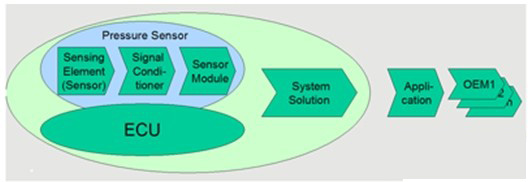
圖5:傳感器的種類相差太大,而且不同的傳感器供應商所采用的架構也有所不同。
從模擬角度來看,市場上提供各種針對所有環境變量的傳感器,而且幾乎所有ECU微控制器都有模擬輸入口。因此,利用市場上現有的元器件,或僅需進行微調的產品開發新應用不會出現大問題或者大風險。
但這樣的情況卻不適合數字通信協議。可用的標準協議必須以特定方式使用。目前可用的數字協議包括:
*CAN:總體來說太過復雜,傳感器成本過于昂貴
*LIN:僅支持最高為19,200baud的低傳輸率
*外部傳感器接口(PAS4,PSI5):專為安全應用(如氣囊)開發,要求9V工作電壓,電流消耗大
*SENT:只能支持單向,目前還處于標準化階段中
于是,在需要數字通信的應用中通常會采用專有方案。這意味著每個電路制造商都有自己的專有協議。支持ZMD31150、ZMD的ZACWire(串行數字接口)提供一個開放標準,能夠提供通信安全,在波特率和行末校準方面具有靈活性。
未來幾年的挑戰,是制定和執行考慮到傳感器系統和應用要求并具成本效益的標準化數字接口。該接口必須滿足下面三個多少有些矛盾的設計條件:
*電路測試:為了測試成本最小化,要求通信速度最大化
*校準:盡可能簡單、靈活
*應用:盡可能快速、安全和兼容,特別是在超出規范工作電壓、EMC高以及最大RF輻射受限的條件下。
汽車傳感器在安全方面的應用正日益增加。對于可以在危險的剎車條件下減小剎車距離的剎車輔助系統來說,需要一個傳感器來測量剎車系統的壓力,使得ECU能夠檢測出由駕駛員所發出的剎車動作。傳感器是激活ABS的關鍵,故傳感器必須100%準確。要保證這一點,自檢功能必須盡可能的全面。
如果傳感器信號調節器(SSC)IC發現模組中的傳感器故障(例如傳感器短路),或者由于外部故障引起了SSC的無效操作,ECU必須能夠確定這些問題。例如,可以利用ZMD31150來說明如何處理上述問題。ZMD31150是一款在汽車應用中進行信號調節的SSC。
ZMD31150中執行的診斷功能(見圖6)將對傳感器機能以及SSC進行連續監控。
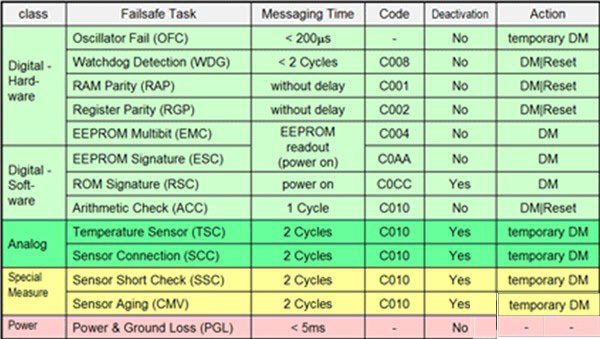
圖6:ZMD31150中執行的診斷功能
一旦檢測到故障,診斷模式(DM)被激活。數字通信消息中將建立一個錯誤標志,或者將模擬輸出切換到預先編程的診斷范圍LDR或HDR上。
可檢測故障分為兩類,即硬件和軟件錯誤。硬件錯誤是在SSC中檢測到的由硬件問題所引發的故障。本例中,信號調節被終止而DM被激活。
相反,軟件錯誤的原因就不會總是這么清楚或連續出現。它們可能由外部原因引起,如EMC干擾或者系統板上其他電氣負載進行開關操作。針對軟件錯誤,這里使用了一個錯誤計數器,當錯誤發生時進行“+”運算,而當錯誤不再發生時進行“—”運算。當檢測不到軟件錯誤時,軟件錯誤消息被低通過濾,傳感器返回到正常操作模式。這樣的做法被稱作臨時診斷DM。
ZMD31150中的臨時DM是一個可選項,在錯誤持續出現時提供可靠的錯誤信息。利用附加信息(如冗余傳感器或進行大量檢查),ECU將決定當前應用能否繼續可靠工作,或者根據錯誤消息必須關斷。
如果隨著感性負載(SchaffnerPulse3a或3b)接通,某個故障耦合到了傳感器系統的電源電壓上,該故障同樣能夠耦合到傳感器上,從而觸發自診斷功能。但是有了臨時DM,這種情況不得不連續出現幾次后才向ECU報告錯誤。由于錯誤計數器過濾了結果,明顯的錯誤信息和相應的誤導將被避免。
例如,許多駕駛員都體驗過儀表盤上突然顯現一個錯誤信號,或者是“檢查發動機”的指示燈點亮,并伴隨一條請與維修廠聯系的信息。有時候該消息在第二天就不再出現,而檢修人員將一個模組或傳感器更換下來后發現沒有任何問題。適當的軟件過濾即可消除這類惱人的事情。
利用傳感器信號調理IC可以大大簡化汽車安全傳感器系統的開發。確保傳感器輸出100%正確的自診斷功能,只能在信號調整階段實現,鑒于此,該功能必須是片上實現。
像ZMD傳感器調理IC這類的器件集成了全面的自診斷功能。通過配置EEPROM,可以對某個錯誤進行精確定義,并且對系統如何反應進行定義。對檢測到的錯誤事件進行響應的各類執行程序,有助于避免明顯的虛假錯誤信息,從而可以增加自診斷的可靠性。




