- 關于GPS的航標遙測系統數值的處理
- GPS OEM板與航道GPS遙測網
- 應用各種濾波方法來消除或減弱各種誤差的影響
- 對水標進行遙測
- 中值濾波法
- 進退遞推濾波法
隨著電子技術和通信技術的發展,無線通信以及遙測遙控系統被廣泛應用于工業、農業、航空、航海等各個領域中。出海口及內陸河道作為航海航運重要的一部分,其管理維護方法及管理質量對我國航運業的影響至關重要。發展至今,電子通信產品的可靠性越來越高,成本越來越低,這使得航道管理維護自動化、數字化的實現成為可能。GPS(全球定位系統)是美國國防部于1973年開始研制的衛星全球導航定位系統,主要為其海陸空三軍服務。近幾年來已逐步應用于民用設施及測繪技術中,同時美國軍方逐步放松對民用GPS設備的限制,使得民用GPS達到了比較高的定位精度。利用GPS對航道航標等設備進行位置遙測與監控是一種比較理想的方法。本文以航標監控的具體要求為標準,把整個航道管理區域內需監控的目標物組成一個GPS遙測網,并利用各種濾波方法消除相應的誤差,提高了遙測數據的準確性。
1.1 GPS OEM板
GPS OEM板是GPS接收機中一個重要的組成部分,它具有成本低、體積小、重量輕、產品種類多、性價比高等很多優點,因此被廣泛應用于定位及導航領域中。它的定位精度已經能達到幾十米,甚至可以達到10米以內的精度。本課題所用到的Thales集團導航定位公司的GPS OEM B12就是一款性價比很高的產品。
1.2 航道監測
航道是交通網絡中一個重要組成部分,其安全質量直接影響著整個交通系統。以前航道部門專門在航道的堤岸、橋頭、故障物旁邊安裝各種航標燈作為警戒導航裝置,各種船只可以根據航標燈光及其閃動頻率來確定自己的航向。至于航標的維護,則是航道部門每隔一定時間派巡航船只對各航標燈進行目測和實測。因為航道中航標燈比較多,這就使得這種巡航航道的維護方式操作繁瑣,運作維護成本高,安全質量低。
[page]
1.3 航道GPS遙測網
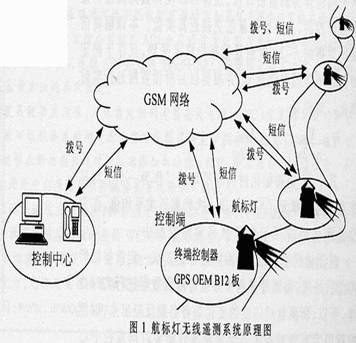
航道中航標遙測網主要是對水標(拋錨在水中的航標)進行遙測以便對其位置進行實時監控(其系統原理圖如圖1所示);
2 誤差分析、數值處理及控制流程
2.1 誤差分析
GPS測量的誤差主要包括衛星部分、信號傳播、信號接收等各個方面帶來的誤差,但從性質上來講可以歸納為系統誤差和隨機誤差兩部分。其中系統誤差主要包括衛星的星歷誤差、衛星鐘差、接收機鐘差以及大氣折射的誤差等。隨機誤差主要包括信號的多路徑效應等。雖然系統誤差比隨機誤差要大些,其消除主要靠接收機本身[1],但是它總是有一定的規律可循的,所以采取一定的措施進行處理對整個系統的可靠性都是非常重要的。由于水面多路徑效應比較嚴重,所以使用精密相位中心、具厄流圈的測量天線是消除由于水面環境所引起誤差的一個重要方法。
2.2 數值處理
針對各種誤差,測量技術中已應用了各種濾波方法來消除或減弱各種誤差的影響,例如中值濾波法、算術平均濾波法、進退遞推濾波法等。通過大量的測量試驗與觀察分析發現,隨著時間的不同、衛星分布狀態的改變以及天氣的變化,GPS所讀數據都有不同曲線方向的飄移,但是其分布狀態接近于正態分布,所以采用一些濾波方法對數據進行處理對整個測量系統精度的提高至關重要。以下是系統中所用到的幾種濾波方法。
Xsum=Xn-XmMIN-XmMAX
[page]
把Xsum存于存儲單元作為后續處理方法的和基準。算術平均濾波法:即采樣一定量的數據,然后對其求平均值作為測量估計值,這樣可以使得偏離真值的正負誤差相消,從而使測量值更接近真實值。本課題將前面所取得的n-2m次測量數據作算術平均,且存于固定的算術平均值存儲單元,并根據以后所讀數據進行實時修正。這樣有:
X=(Xswn)/(n-2m);Xi=(Xsumi)/(n-2m).
其中,X是初始化時所求平均值,作為一個平均基準存于存儲單元。Xi是每讀一次數據所求平均值,作為位置評估值應用于位置飄移判斷控制中。
Xswni=Xsum_i-1+Xi-1+xi
限幅濾波法:在測量過程中,常常會碰到偏離中值較遠的粗大誤差。這對經過前面幾種濾波法處理后的數據基準會產生較大的沖擊,限幅濾波法就是針對這一思想的。設定一個閾值,當所測數據與基準數據比較后,差值超過閾值就認為是粗大誤差并舍掉。但是本課題中如果航標燈因意外而漂出很遠,就必須能識別出來,而不能當粗大誤差全部舍掉。所以在控制程序中專門設計了一計數器對舍掉比率進行計數,如果舍掉比率大于某一值則重新初始化,即重新讀取n-2m次的和基準及其算術平均基準。
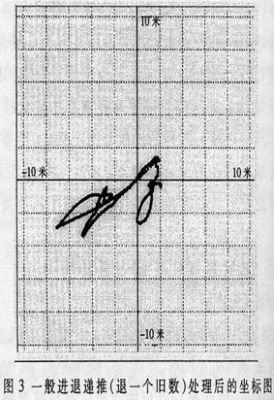
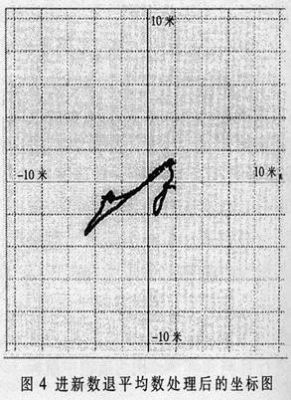
圖2、圖3、圖4分別是對利用Visual Basic6.0開發的數據采集與處理程序采集的10小時GPS數據進行幾種數據處理后的坐標示意圖(其中,橫坐標、縱坐標分別表示經、緯度)。從這三個圖中可以看出,從圖2到圖4,數據收斂性依次增強,可見綜合幾種濾波法于數據處理中,將大大減少誤差,提高系統精度。
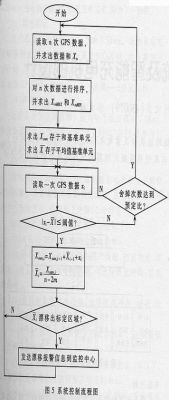
2.3 控制流程
系統控制流程圖如圖5所示。