
- 磁敏傳感技術的位移測量編碼與識別研究
- 圖像分析法和雙頻激光測量法
- 光柵或磁柵測量法和磁阻或磁場測量法
位移測量的常見方法有圖像分析法、雙頻激光測量法、光柵或磁柵測量法、磁阻或磁場測量法等。其中基于磁敏傳感技術的磁性標尺型測最方法具有如下優點:不存在因相對運動出現的部件磨損問題;信息靈敏度高,動態響應好;易于實現傳感器集成化、智能化;功耗低,安全可靠等。但目前的測量方法存在以下缺陷:
記數方式的相對暈測量,在失電后會丟失對正確位置的記憶:幀重疊編碼方式的絕對景測量,容錯能力差,表征長度受限。針對這些技術缺陷,本文提出了一種帶有標志位的絕對式編碼方法,使得識別出的序列含有用于粗讀數的數值碼和用于精讀數的標識碼,不僅避免了相對式測量的“失憶”問題,而且突破了絕對式測量的表征范圍瓶頸,增強了容錯能力。
1 編碼規則
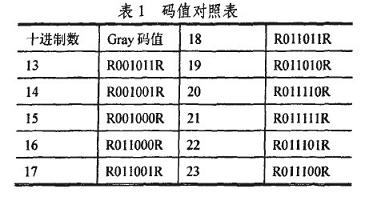
編碼采用格雷碼(Gray)為數值碼,以某一固定碼寬為參考碼R,它用于標尺定位和提高精度。Gray碼是一種絕對編碼方式的無權碼,它所具有的循環、單步特性能消除隨機取數時出現重大誤差的可能,其任意兩個柏鄰整數之間轉換時,只有一個位數發生變化,大大減少了由一個狀態轉到下一個狀態時的邏輯混淆,具有較強的容錯能力。以6位編碼為例,其部分十進制數與Gray碼的一一對應關系如表1所示。
2 磁路結構與識別
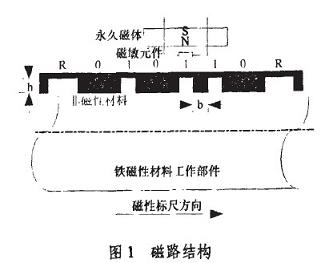
采用圖1所示的測量結構,其中被測工作部件要求屬于鐵磁性材料。文獻中指出在固定的磁場中,表面變化的曲率越大,引起的周圍磁場,變化也越大。為了使磁場的影響最大,選用凹槽作為測罩標志,以單位寬度(bmm)的凹槽表示“0”或碼元間隔,單能寬度的“凸槽”表示“1”,兩倍單位寬度的“凸槽”表示標志位R。在工作部件表面,按上述的編碼規則加下出一系列凹槽,然后噴涂上非磁性材料,形成磁性標尺。圖1所示的磁性標尺表示Gray碼01 1010碼區,黑色部分表示非磁性材料。
激勵磁場采用長方體永久磁體,其磁極贏接對著磁性標尺,使測量出的有效磁場變化范圍大。
磁場通過磁性標尺形成通路,磁敏元件測出磁性標八表面變化引起的磁場變化。通過磁路分析和標罩磁位等高線計算發現,磁性標尺的槽深h越人越好,槽寬b應小于3mm。
根據磁敏傳感原理,“凹槽”和“凸槽“會導致不同的磁場強度,從而使磁敏元件相應地輸出不同的電半信號“0”或“1”,形成數值碼,用于確定位移的粗讀值;而標志位R碼寬兩倍于碼元“1”寬度的特點,使得識別后的序列出現具有固定特征的標識碼,它用于精讀數。
3 應用實例
若圖1中的“鐵磁性材料下作部件”表示液壓缸的活塞桿;“非磁性材料”為特制黑色陶瓷,平整地覆蓋在活塞桿表面;“磁敏元件”為霍爾元件,它以兩個單位寬度為軸向間隔,繞活塞桿環狀布置在液壓缸前端,軸線與活塞桿一·致,以便盡可能減少活塞桿的角位移和徑向位移的影響,精確測出其位置。
磁路結構
[page]
可知,要識別一個完粘的碼區必須設置9個霍爾元件,但為了能隨時識別出一個完整碼區,必須設置16個霍爾元件。以圖2所示時刻位置來說明其丁作過程,其中箭頭表示霍爾元件,數字為其編號。
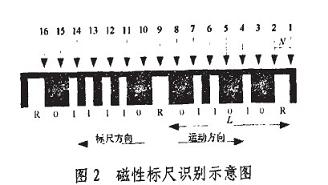
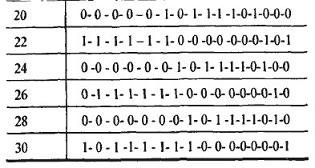
霍爾電路的工作原理是,在外磁場的作用下,當磁感應強度B超過導通工作點時,霍爾電路輸出管導通,輸出低電-半:若曰值低于釋放點時,輸出管截止,輸出高電半。因此在“凸槽”時鋼質活塞桿被磁化,磁感應強度曰增加,霍爾電路導通,輸出低電平,用“1”表示;在“凹槽”時輸出高電平,用“0”表示。以第1個霍爾元件為測量基準,從圖2所示時刻起,位移暈旃次變化b=2mm時,一個碼區行程內霍爾電路輸出的二進制序列如表2所示。分析可知,序列的標識碼為l 0000000 1,其前面或后面6位序列數分別為相鄰的兩個數值碼,這使它具有很強的容錯能力。標識碼每隔一個霍爾元件間距N在低位部分右移一位。值得注意的是,標識碼前面的數值碼代表磁性標尺當前檢測位置下一個碼區的值。

綜上,液壓缸活塞桿的行程讀數為S=30(x—1)+4Xa+b此類磁性標尺編碼有兩人優點:第一,便于找到即時位置的絕對行程值;第二,起校準作用,及時糾正行程計算錯誤。
4 結語
編碼技術廣泛應用于交通運輸業、商業、測量丁程、制造業等領域,極大地提高了數據采集和信息處理的速度,改善了人們的工作和生活環境,提高了工作效率。本文提出的基于絕對量編碼和磁敏傳感技術的位移測量方法,以磁場方向變化為檢測信號,其電磁轉換特性使得整段磁性標尺可看作一個二進制序列,從而通過編碼技術狹得被測量。所用方法克服了機械式位移測量系統體積大、精度低的缺點,具有行程長、測量精度與行程長度無關、可靠性高等優點,有較廣泛的應用價值。



