

【導讀】本文采用圖像傳感器代替了光敏電阻檢測太陽位置的變化,可以準確、快速地獲得太陽位置信息,從而提高了跟蹤精度。同時其結構簡化,成本降低。
系統總體設計
該系統主要由平面鏡跟蹤裝置、控制和驅動電路、方位限位電路、CMOS圖像傳感器(附巴德膜濾波片)等部分組成。系統總體設計框圖如圖1所示。跟蹤裝置實物圖如圖2所示,圖像傳感器固定在平面鏡中心。圖像傳感器產品主要分為CCD,CMOS以及CIS傳感器三種。目前CMOS型不僅價格低廉,而且已經實現數字化輸出,軟件可編程控制,大大降低系統設計的難度,提高系統設計的靈活性、抗干擾性和穩定性。
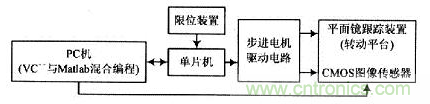
圖1:系統總體框圖
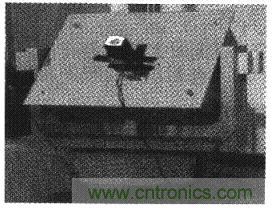
圖2:太陽自動跟蹤裝置實物圖
CMOS圖像傳感器滿足系統設計要求。跟蹤控制器采用羅技公司的QuickCam系列網絡攝像頭,具有功耗小、成本低、單一電源驅動、易于實現片上系統集成等特點。其開窗特征可以根據實際需要設置有效圖像數據窗口的大小,從而避免了對無效數據的采集,減小存儲空間。
由于太陽光十分強烈,因此在圖像采集時,需要給攝像頭加上巴德膜濾波片。實驗表明加兩層濾波片后,所得到的圖像效果較佳。
系統工作過程為:啟動時,上位機VC++調用視日運動規律中的sun函數,獲取太陽的高度角與方位角,并轉化為俯仰和水平步進電機的運行步數,通過RS 485總線與單片機通信,驅動跟蹤裝置運轉,確保太陽光斑裝入CMOS圖像傳感器視角內。
通過MCC實現VC++與Matlab聯合編程,實時控制圖像傳感器采集太陽光斑圖像。VC++程序設置為每隔5 min自動調用傳感器拍一次照,傳回的圖像經Matlab處理,計算出太陽光斑質心坐標與圖像中心坐標的偏差,轉化為水平和俯仰電機需調整的步數,返回給VC++,再次送給單片機,驅動步進電機動作,進而細微調整平面鏡跟蹤裝置,使太陽光斑始終在圖像中心位置。
當厚云層擋住太陽時,或者由于其他原因太陽光斑無法出現在傳感器視角內,則VC++調用時鐘跟蹤算法,繼續跟蹤,直到云層過去后,再重新使用圖像傳感器跟蹤。
圖像傳感器實時跟蹤太陽的設計
圖像傳感器的自動跟蹤原理
VC++設置為每隔5 min自動調用傳感器拍一次照,傳回的圖像經Matlab處理,計算出太陽質心坐標與圖像中心坐標的偏差,并轉化為水平和俯仰電機需調整的步數,再次送給單片機驅動步進電機,進而細微調整平面鏡跟蹤裝置,實現對太陽連續自動跟蹤。
FYP定義為俯仰步進電機應運行步數,FWP表示方位步進電機應運行步數。方位步進電機每動作一步實際為(1.8/100)°,俯仰步進電機每動作一步實際為(1.8/52)°。當系統實際運行時,光斑在圖像中心時設定坐標為(160,120),向下移動出圖像FYP為50;向右移動出圖像FWP為160。若太陽光斑不在中心點時,如圖3所示,經Matlab程序執行結果為光斑圖像坐標(115,117),光斑個數為1,對應FYP為1,FWP為-46。

圖3:太陽光斑不在中心點的圖像
圖像處理過程中運用了最大類間方差法Otsu,是根據最小二乘原理推導出來的,它基于直方圖來選取閾值,其基本思路是將直方圖在某一閾值處分割成兩組,當被分成的兩組的方差為最大時,得到閾值。方差是灰度分布均勻性一種量度,方差值越大說明構成圖像的兩部分差別越大,當部分目標錯分為背景,或部分背景錯分為目標都會導致兩部分差別變小,所以使類間方差最大的分割意味著錯分概率最小。Otsu算法具有簡單、分割速度快等優點,對噪音和目標大小十分敏感,對于信噪比較高的圖像具有很好的分割效果,被認為閾值自動選取的最優方法之一。
圖4為拍攝到太陽光斑存在干擾時的圖像,對比圖4(a)和圖4(b)可發現用Otsu法分割處理后,能有效消除圖像中細微干擾。圖4(c)由Otsu法處理后得到圖4(d),光斑圖像坐標(160,120),光斑個數為2,對應FYP和FWP為O。由此判斷拍攝的圖像存在明顯干擾,程序將FYP和FWP置為O,確保系統的可靠性。
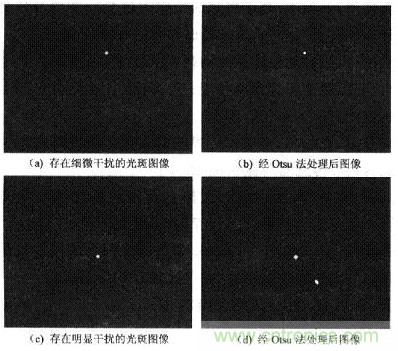
圖4:跟蹤過程中存在干擾時的太陽光斑圖像
[page]
一般情況下使用圖像傳感器跟蹤,但當陰天或出現厚云層時,太陽光斑無法出現在傳感器視角內,VC++立即調用時鐘算法,根據太陽在天空中每分鐘運動的角度,計算出跟蹤控制器5 min應轉動的角度,從而確定出步進電機的轉速,使得裝置根據太陽位置而相應變動。
系統軟件設計
軟件的主要部分為PC機部分,PC機環境為Windows XP,使用軟件Microsoft Visual C++6.0和Matlab 7.0。啟動時VC++負責調用一次sun函數,返回當前時刻太陽的高度角和方位角,并轉化為FYP和FWP運行步數。通過調用Windows API函數,實現上位機與單片機間數據的傳遞。通過MCC實現VC++與Matlab的聯合編程,控制攝像頭采集太陽光斑圖像,根據太陽光斑質心坐標與圖像中心坐標的偏差轉化為FYP和FWP校正步數。
上位機可執行程序控制界面如圖5所示,上位機控制平臺具有實現復位,太陽位置的跟蹤、手動校準。其中“設置”按鈕,可進行波特率、調整時間間隔等的設置。
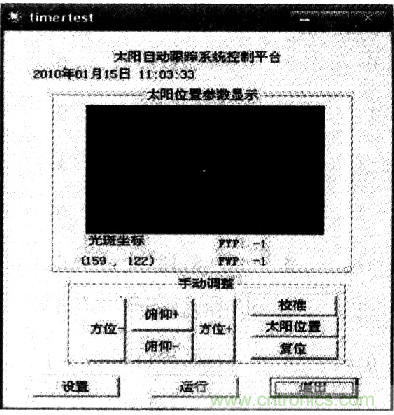
圖5:上位機主控界面
實驗數據分析
實驗在蘇州大學現代光學所內進行,數據觀察時間為12月下旬至1月上旬。因數據量大,表1只列出2010年1月7日記錄的部分數據。具體測試方法如下:
(1)參數設置。包括設置當前時間、波特率、通信端口、圖像傳感器運行時間間隔等。
(2)運行VC++程序。上位機中VC++程序首先調用sun函數,返回此時的太陽高度角和方位角,換算成俯仰和方位步進電機所需的步數。只記錄下由Matlab生成txt文件中的需要校正的步數。
(3)系統自動校正完成后,Matlab再次寫txt文件,保存校正后太陽光斑的圖像坐標,以及光斑質心坐標與圖像中心坐標的偏差。此時記錄。
(4)每隔5 min重復(2),(3)步驟。
圖6和圖7給出了太陽高度角和方位角的誤差曲線。由曲線看出,采用基于圖像傳感器的太陽自動跟蹤控制器后絕對誤差較小且保持相對穩定。通過對實測數據的分析表明:在該系統中,高度角跟蹤絕對誤差小于0.12°,方位角跟蹤絕對誤差小于0.08°,采用圖像傳感器對太陽進行跟蹤后,得到了很高的精度,且可靠性提高。
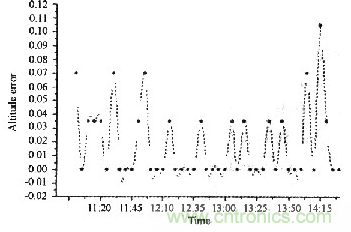
圖6:俯仰實際絕對誤差值曲線
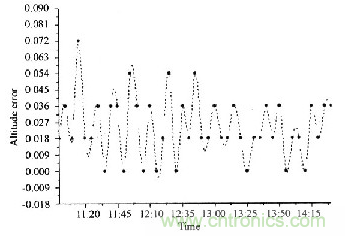
圖7:方位誤差跟蹤曲線
結語
該跟蹤控制器可以連續跟蹤太陽的角度變化,更準確實現對太陽運動的跟蹤。當出現陰天或多云情況下,系統調用時鐘算法,使得裝置連續跟蹤。經過實驗測試,各項指標均達到了設計要求。
控制器采用低速處理器實現了對太陽光斑的采集及定位,可應用于各種太陽能設備,提高太陽能的利用率。如果使用步進電動機的微步距控制技術,即用細分技術實現將步進電動機一個整步均分為若干個更細的微步,可以使整個控制系統更加精準,可用來實現對各種點光源的檢測。



