
【導(dǎo)讀】對于復(fù)雜且高動態(tài)慣性配置的MEMS IMU應(yīng)用,評估功能時需要考慮許多屬性。在設(shè)計周期早期評估這些屬性優(yōu)于追逐開放性成果,從而實現(xiàn)“盡可能精確”。這里我們分享了適合高要求應(yīng)用的高性能MEMS IMU解決方案。
什么是IMU?
它代表慣性測量單元。 當(dāng)有人提到這個縮寫名稱時,我們先看一下傳感器功能,它們能做什么。 想象一個笛卡爾坐標(biāo)系,如下圖所示,具有x軸、y軸和z軸,傳感器能夠測量各軸方向的線性運動,以及圍繞各軸的旋轉(zhuǎn)運動。 這就是所有慣性測量單元的根本出發(fā)點,所有慣性導(dǎo)航系統(tǒng)都是據(jù)此而構(gòu)建。
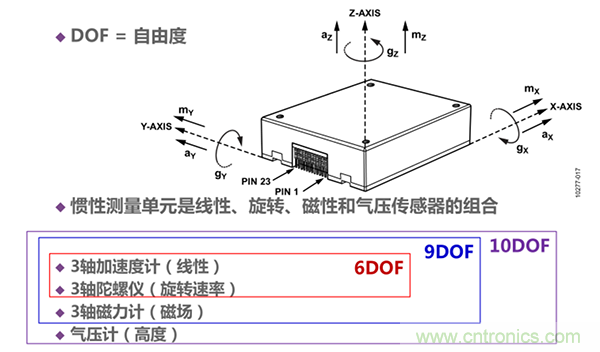
這些器件帶有一個三軸加速度計,顯然這是指x軸、y軸和z軸。 加速度計會測量線性速度的變化,也會響應(yīng)重力。
IMU中傳感器的功能
加速度計會根據(jù)其方向而對重力作出響應(yīng),如左圖所示,這使得我們能夠基于非常簡單的三角公式估算其方向。 利用arcsin公式,我們可以使用一個軸,而利用arctan公式,我們可以將笛卡爾坐標(biāo)系中兩個彼此正交的軸合并。
二者的主要區(qū)別在于:arcsin方法能夠測量+/- 90度,而arctan方法能夠測量+/- 180度,也就是全部360度,這樣您將知道您在哪一個象限。
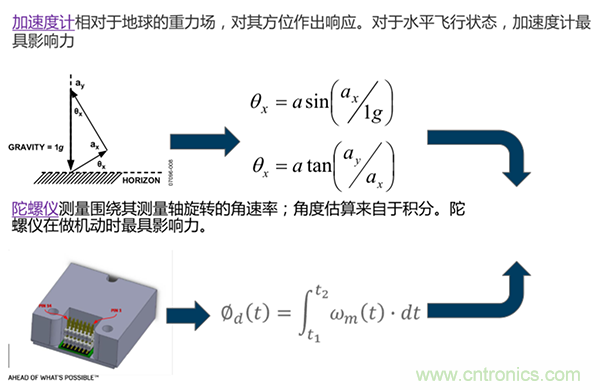
陀螺儀對旋轉(zhuǎn)角速率進行積分,您就能估算角位移。 大致上說,加速度計具有很好的長期偏置穩(wěn)定性和長期精度,但會對線性振動作出響應(yīng)。 當(dāng)進行角度估計時,線性振動會表現(xiàn)出來,有時候需要濾波,這會給其他方面帶來負(fù)擔(dān),或者有時候振動太高,超出加速度計測量范圍,從而完全破壞角度估計。
因此,陀螺儀沒有對線性振動的一階響應(yīng),但因為它對輸出進行積分,所以任何偏置誤差都會轉(zhuǎn)換為角度估計的漂移。 任何系統(tǒng)的基本調(diào)整空間在于使用此類傳感器的根本出發(fā)點。 加速度計的長期穩(wěn)定性更好,但易受振動影響。 陀螺儀不易受振動影響,但長期穩(wěn)定性較差,會導(dǎo)致估算更快地漂移。
IMU應(yīng)用實例:工業(yè)檢查系統(tǒng)
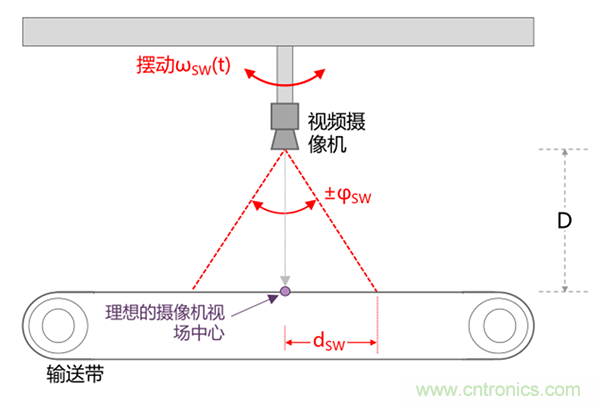
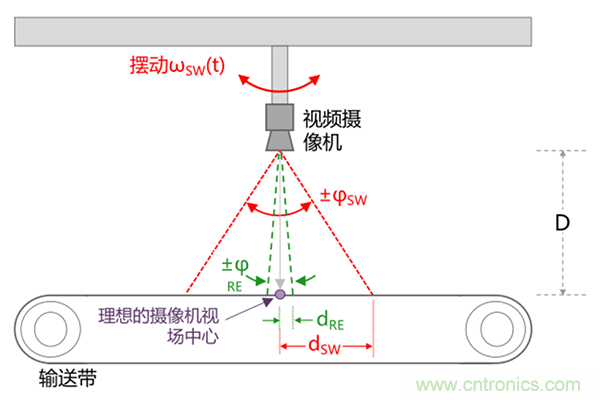
想象屏幕上方的灰色條是生產(chǎn)車間的天花板。 天花板安裝了某種攝像或照相設(shè)備,該設(shè)備檢視其視場下方的生產(chǎn)線中的物件。 再想象某個東西進入視場,停留適當(dāng)?shù)臅r間以供拍照,然后移動到工藝的下一部分。
攝像頭的目標(biāo)是在檢視對象上分辨出特定物理屬性。 很顯然,它離地必須足夠高,以便其視場能涵蓋整個對象,但又不能過高以致圖像失真。 在此類場景中,工廠中的叉車、大量人員和其他機械的行走會引起此類設(shè)備擺動,圖中的紅色虛線反映了這種情況,擺動的最大角度用希臘字母φ加下標(biāo)SW表示。
圖中所示的情況與實際發(fā)生的情況相比有些夸大,但把虛線端部與理想的攝像機視場中心相比較非常重要,因為在這個特定應(yīng)用中,失真可以與線性位移聯(lián)系起來,也就是底部的變量dsw。 最終,該檢查系統(tǒng)的質(zhì)量取決于您能把dsw和φsw項縮小到什么程度。
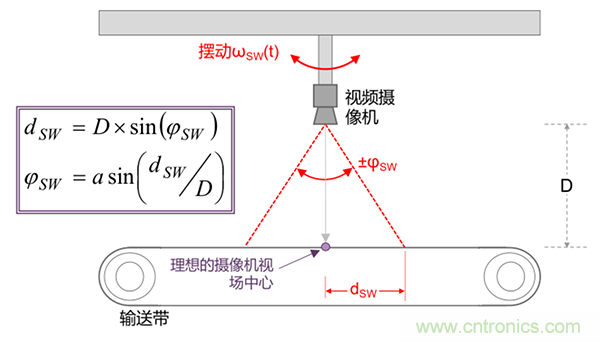
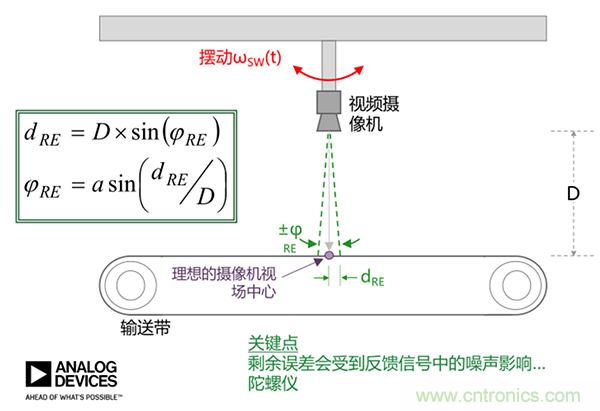
知道該類運動存在并考慮物理位移與實際角度擺動位移之間的簡單幾何關(guān)系,您就可以把它表示成物理術(shù)語,并與系統(tǒng)的實際參數(shù)聯(lián)系起來。
假設(shè)檢查一塊塑料,要求它恰好為12英寸長,誤差為+/-0.5英寸。 因此,攝像機視場的分辨率必須在0.5英寸以內(nèi),由此可以反推出攝像機平臺的實際角度精度要求。
運動控制涉及各種各樣的應(yīng)用。 假設(shè)把攝像機,也就是攝像機上的實際成像元件,放在一個小型伺服電機上,它將能抵消擺動效應(yīng)。 當(dāng)攝像機向左擺動時,伺服電機向右擺動,這樣,接收物件表面光線的成像元件實際上沒有運動,圖像就不會失真。 這就是成像穩(wěn)定技術(shù), 現(xiàn)在已經(jīng)相當(dāng)普遍。 過去它只用在高端攝像機上,現(xiàn)在由于MEMS技術(shù),大量數(shù)碼攝像機也已采用。
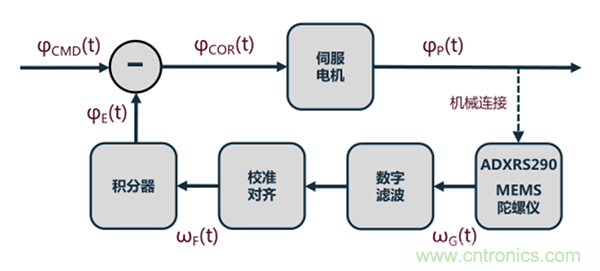
這是一個工業(yè)應(yīng)用示例,它有不同的誤差源需要考慮,但原理非常簡單。 使用MEMS陀螺儀測量運動,然后經(jīng)過一系列數(shù)字信號處理,包括濾波、校準(zhǔn)和積分,以便估計擺動角度,讓伺服系統(tǒng)知道要往回擺動多遠(yuǎn)。 這就是所謂閉環(huán)系統(tǒng)。
了解這些之后,對于此類系統(tǒng),我們就能知道這些誤差源對系統(tǒng)性能會有什么樣的影響。
再看原圖,實際上添加了兩條綠色虛線,這個窗口要窄得多。 紅線反映系統(tǒng)中實際發(fā)生的情況,綠線告訴我們控制系統(tǒng)穩(wěn)定攝像機的效果。
有了這些物理參照之后,為了使它有效,陀螺儀性能必須達到什么程度? 回到之前的公式,不過現(xiàn)在是應(yīng)用于綠線,它代表執(zhí)行校正之后或控制環(huán)路全面運行之后的殘余誤差。
在這張幻燈片中,最重要的一點是它讓我們能將系統(tǒng)的物理參數(shù)與傳感器指標(biāo)聯(lián)系起來。 如今的運動控制系統(tǒng)設(shè)計師必須不斷地考慮物理行為與傳感器特性兩方面,只有這樣才能作出最恰當(dāng)?shù)臎Q策。不僅是設(shè)計產(chǎn)品,甚至還要考慮概念和架構(gòu)決策,需要從何種等級的傳感器開始以便成功實現(xiàn)特定應(yīng)用。 此類考慮常常是富有成效的,因為它能幫助您從一開始就找準(zhǔn)設(shè)計思路。
我們都想要成本低至1美元、功耗只有1微安而且終身都保持最高精度的傳感器。 但現(xiàn)實是,利用目前的技術(shù)無法制造出這樣的產(chǎn)品。 現(xiàn)有解決方案的成本從不到1美元到10萬美元不等。 對于手頭的設(shè)計任務(wù),從一開始就要考慮尋找最合適的傳感器。 上面提到過,關(guān)于運動檢測器件,最令人激動的地方是我們能親眼看到它。 我可以在桌面上推動玻璃杯, 我可以轉(zhuǎn)動我的座椅, 這些都可以同我每天都要打交道的東西聯(lián)系起來,顯然很有幫助。
現(xiàn)在看一個真正重要的參數(shù),并了解陀螺儀是如何規(guī)定的。IEEE規(guī)范通過許多方式來量化噪聲,但對于這個特定應(yīng)用,最合適的方式是查看角向隨機游動。 藍(lán)色虛線顯示的是誤差相對時間的累積。 對于我們的攝像或成像系統(tǒng),您可以確定圖像捕捉時間d有多長? 它是否意味著快門打開的時間? 它是否意味著器件停止以供攝像的時間?
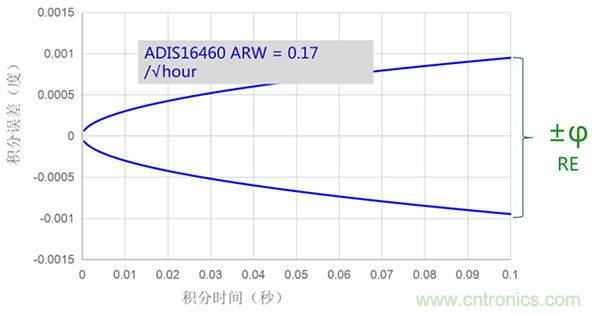
您可以通過多個方面來把我們的應(yīng)用與此類指標(biāo)聯(lián)系起來,這樣我們就可以開始估計,在我們的時間范圍內(nèi),其擺動幅度有多大? 在這個特定情形中,快門開啟時間為0.1秒或100毫秒,對應(yīng)的誤差小于0.001度。
各類IMU產(chǎn)品的區(qū)別在哪里
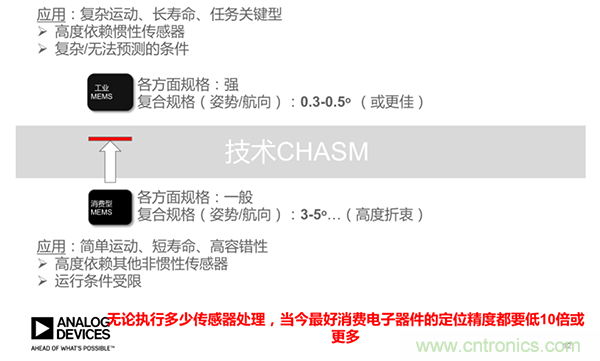
工業(yè)級MEMS技術(shù)是相對消費級器件而言的,前者成本更高,但遠(yuǎn)低于傳統(tǒng)光纖或環(huán)形激光陀螺儀技術(shù)。 這里將從消費級市場開始,說明我們所稱的技術(shù)差別。
從多個角度看,這種技術(shù)差異都是值得關(guān)注的,正如前面所說的,目前市場上有很多應(yīng)用,包括大量可穿戴技術(shù)和手機等,其動態(tài)角度估計能有幾度的分辨率精度就夠好了。 對于手機而言,若想知道圖片的哪個方向朝上,精度只要大約45度就可以了。 在手機上查看不同的東西或玩游戲時,常常也只需要3到5度的精度。
再看偏向于工業(yè)應(yīng)用的器件,您會要求其性能高出10倍以上,而且要能承受更惡劣的環(huán)境條件,這很重要。 使用成本不到10美元的器件時,年使用量可能是10,000只;再看工業(yè)級陀螺儀,使用量可能是數(shù)百只左右,成本可能是100美元,理解這一點很重要。
談?wù)摵唵芜\動和復(fù)雜運動時,想想它涉及到多少個軸。 我拿著手機,沿著一個方向轉(zhuǎn)動,那么就是繞一個軸旋轉(zhuǎn)。 這是相對簡單的運動。再想象有一輛無人駕駛汽車,沿著崎嶇的路面高速行駛。 很顯然,它會沿著各個方向跳動,因此可以預(yù)期,所有三個軸方向上都有運動,不光是三個軸,還有線性和旋轉(zhuǎn)信息。 您會考慮需要什么樣的精度,還有應(yīng)用所處的條件。
從這里的說明可以看出,消費級設(shè)備在變得越來越好,但工業(yè)級設(shè)備也是如此。 隨著時間推移,某些應(yīng)用空間會成熟起來。 消費級設(shè)備可能跟上一些發(fā)展,并且?guī)椭鉀Q許多需求,但總是存在一系列不斷發(fā)展的應(yīng)用需要更高的性能水平,而且會有項目來證明為此付出額外的成本是值得的。
大量研究都發(fā)現(xiàn)了這樣一個趨勢:偏置和其他重要參數(shù)的長期穩(wěn)定性與對傳感器中的機械應(yīng)力的管理好壞有關(guān)。 封裝已變得非常重要。 往手機中添加?xùn)|西時,需要把它做得盡可能小,成本盡可能低;不是任務(wù)需要的材料,每一微克都要從設(shè)備中去除。 自然,它們會更容易受物理應(yīng)力影響。 甚至把手機放到口袋這樣簡單的事情也會導(dǎo)致封裝彎曲,改變其特性。 對于這些事情,工業(yè)級IMU至少會在一階上進行處理。
核心傳感器知識和經(jīng)驗
下圖右上方是一個四諧振器內(nèi)核,ADXRS64X系列陀螺儀實際上就是采用這種內(nèi)核。 該四諧振器內(nèi)核提供兩種不同水平的線性抑制,我們稱之為器件的共模抑制。 這使它在振動抑制方面實現(xiàn)了大跨越。 尤其是0.0001度/秒/g2這一數(shù)據(jù),對許多傳統(tǒng)上需要數(shù)萬美元解決方案才能上市的應(yīng)用而言,可謂關(guān)系重大。 現(xiàn)在,不到1,000美元的解決方案就能實現(xiàn)此類性能。 它在面市時是非常令人激動的,今天仍然很常用。
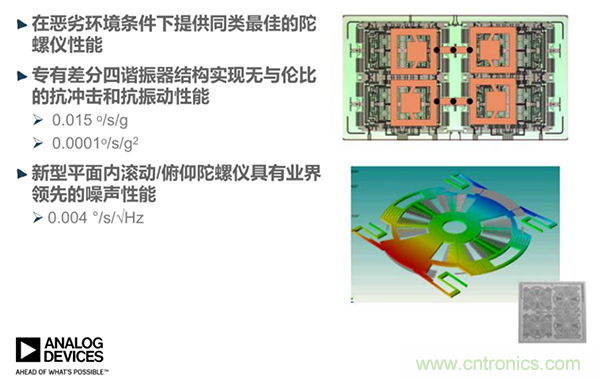
新一代傳感器技術(shù),即右下方的彈性碟方法,是當(dāng)前產(chǎn)品的核心技術(shù),ADXRS290和ADIS16460慣性測量單元均采用該技術(shù)。 利用多方面的工藝改進和全新的機械架構(gòu),我們得以降低噪聲和角向隨機游動,這在前面的幻燈片中已予以說明,其性能比我們過去的工業(yè)級產(chǎn)品線所采用的各種陀螺儀技術(shù)要高出4倍。
核心傳感器的典型性能差距在哪里?
針對消費市場的MEMS IMU與針對工業(yè)市場的MEMS IMU進行比較時,又會顯露出哪些重要特性?
* 跨軸靈敏度
* 線性振動抑制
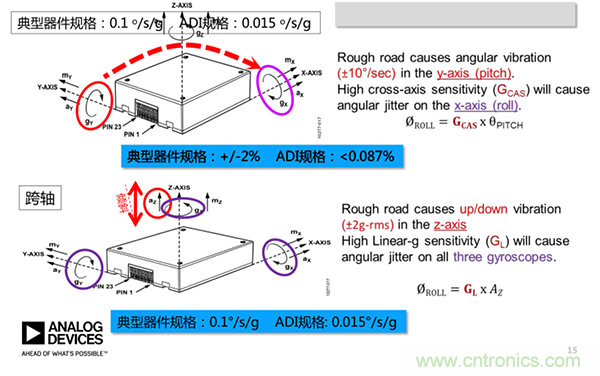
跨軸靈敏度
想象把一個IMU放在桌面上,并使它來回轉(zhuǎn)動。 理論上,該運動只應(yīng)顯示在一個陀螺儀上,假設(shè)是z軸。 x軸和y軸陀螺儀對此不應(yīng)有所響應(yīng)。 然而,它們實際上會有所響應(yīng),跨軸靈敏度反映的就是這種響應(yīng)的程度。 跨軸靈敏度還與這些器件在內(nèi)部的對齊程度有關(guān)。 除物理對齊外,還有電子校準(zhǔn)對齊。 就跨軸靈敏度而言,一般器件的典型值為2%,而針對工業(yè)市場的MEMS器件則是不到0.1%。 二者相差大約20倍,某些情況下您可以通過系統(tǒng)校準(zhǔn)來彌補,但它仍有封裝依賴性,當(dāng)封裝隨著時間而松弛時,跨軸靈敏度又會降低。 因此,針對要求終身保持高性能的應(yīng)用進行設(shè)計時,必須考慮這一10到20倍的性能差距。
線性振動抑制
想象一下,讓搭載IMU的印刷電路板在同一張桌子上沿線性方向來回運動。理論上,陀螺儀僅測量角向運動,因此其響應(yīng)應(yīng)為0。 然而,由于器件制造的一些實際限制,所有MEMS陀螺儀對線性振動都有一定程度的響應(yīng)。 如何規(guī)定和說明這種響應(yīng),對制造商而言是一個重要判斷點,很多時候根本不做規(guī)定。 即使做了規(guī)定,也不是在全頻率范圍內(nèi)進行測定或規(guī)定。 一個器件可能有100 Hz的諧振頻率,若用一個grms激勵它,陀螺儀上可能顯示一個10度/秒信號,這會擾亂所有需要一定精度水平的測量,因為它是一個非模式化的誤差。 對此需要進行非常細(xì)致的研究,這是非常重要的。
以典型方式把這些參數(shù)放在相關(guān)情形下進行分析,紫色線表示速率噪聲密度。 速率噪聲密度代表器件完全靜止時的輸出噪聲。 橙色和紅色虛線表示我剛才討論的內(nèi)容。 這些是噪聲源,可能來自我們所稱的無關(guān)源,導(dǎo)航行業(yè)稱之為非模式化的能量源。 市場上可能有這樣的器件:一個器件的紫色線比另一個器件要低,但機械諧振和線性振動響應(yīng)卻要高得多。
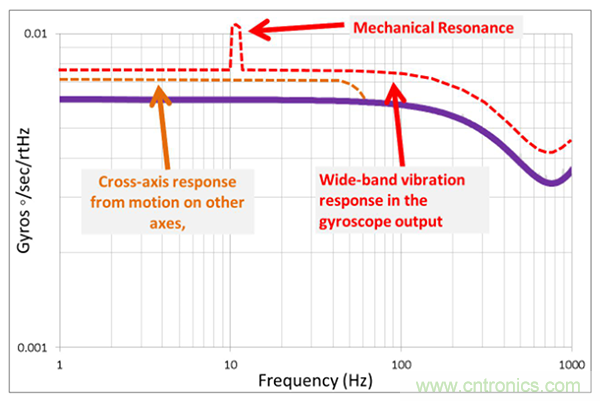
如果只看一個噪聲參數(shù),可能會輕信這只陀螺儀更好,但實際上,您需要關(guān)注所有三個參數(shù)和線性振動信息,甚至可能要估計軸上的旋轉(zhuǎn)量。 全面地看問題,而不要片面地看問題,確實非常重要。 從頻譜角度看,總噪聲就是曲線下方的面積。 在這一特定情形中,總能量顯然是以線性振動響應(yīng)為主,但不同應(yīng)用會有不同的分析。 重要的是,在作出關(guān)于使用何種產(chǎn)品的長期決策之前,務(wù)必注意這一點。
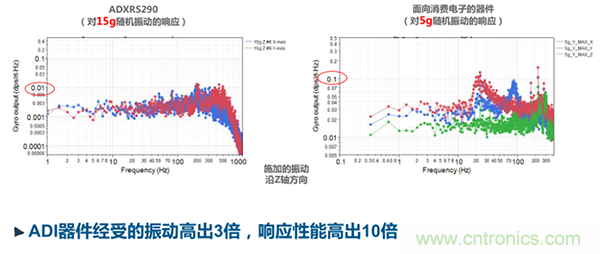
了解實際的測試信息非常重要。 數(shù)據(jù)手冊常常不提供此類信息,需要您去詢問。 多數(shù)公司開設(shè)了論壇,您可以在其中提問。 如果不能在論壇中詢問,請通過銷售渠道查詢,能否找到生產(chǎn)線人員并咨詢。 否則可能會出問題。 這里給出了兩個不同陀螺儀的響應(yīng)曲線,左邊是ADXRS290,右邊是一款主要針對消費市場的器件。 雖然工業(yè)級器件經(jīng)受的振動要高出3倍,但其性能仍然要高出10倍左右。 若把它放到上一張幻燈片中,計算曲線下的總能量,濾波需求將很可怕,帶寬會非常低,因為這會影響穩(wěn)定性控制。 所以,了解這些重要區(qū)別是極其重要的。
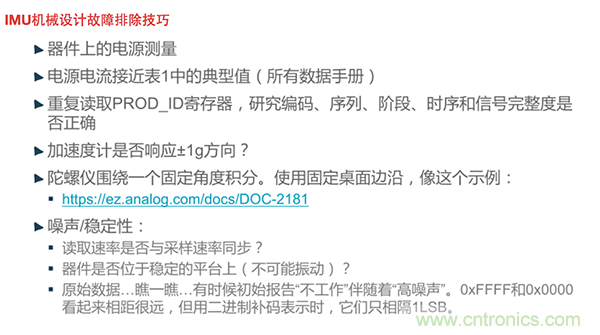
IMU機械設(shè)計如何避免設(shè)計陷阱
第一,根據(jù)現(xiàn)有的最佳建議開始機械設(shè)計。 我們已經(jīng)看到,機械設(shè)計不當(dāng)會引起長期漂移。 需要強調(diào)的是,如果把IMU安裝在不是針對它而設(shè)計的表面上,封裝上就會有應(yīng)力,進而影響器件的行為。 對此您應(yīng)有所考慮。
第二個需要考慮的事項是:如何連接該器件? 如果是嵌入式SPI產(chǎn)品,它本質(zhì)上是一個從機,您需要4條IO線來管理SPI接口。 您需要電源, 需要接地,有時還需要時鐘或數(shù)據(jù)就緒接口,但其實也就這么簡單。 您需要考慮長期系統(tǒng)的接口類型。
第三是注意通信協(xié)議。 我們所有數(shù)據(jù)手冊都有簡單的測試案例,您可以在環(huán)運行,調(diào)試信號完整度、代碼、位序、時序等。 我們還有示例代碼,它可幫助您快速上手,但其在細(xì)節(jié)上有所不同。 它提供測試碼供您使用,您可以用示波器探頭排除各類故障。 這也是大家都感興趣的一個方面。
第四起始代碼。利用這些代碼,您就能將器件連接到嵌入式處理器。
推薦閱讀:




