

【導讀】拉繩傳感器,也稱之為拉繩位移傳感器,就是利用收卷輪周長計量物體長度距離。直白的說,拉線式位移傳感器好比一把卷尺,通過拉繩的長度變化,測出對應的位移量,轉換成對應精度的脈沖輸出,也就是位移量到數字量的轉換。拉線位移傳感器應用于非常廣泛的工程領域,各類需要檢測直線位移、速率、方向的場合都有拉繩產品的身影,例如直線導軌系統,液壓氣缸系統等。
拉繩位移傳感器工作原理
通過一系列的機械結構,將內部單圈或多圈電位器的角度變化轉換為外部連接端的直線位移變化,并以各種信號形式將這種變化以模擬量或數字量進行輸出。由于其輸出端是柔軟的鋼絲線,所以可以通過滑輪,轉盤等機構進行過渡,在不沿著被測物運動方向的地方進行安裝,所以在安裝使用上,拉繩傳感器具有電子尺無法比擬的靈活性和適應性。

拉繩位移傳感器的功能與應用范圍
把機械運動轉換成可以計量、記錄或傳送的電信號。感應器可以是編碼器、旋轉電位計、同步器或解析器。常用參數有測量行程、輸出信號形式、分辨率、工作電壓等。信號輸出方式通常匹配編碼器的輸出方式,例如常見的數字脈沖輸出等。
應用范圍:萬能試驗機位置控制、導軌位置控制、印刷機傳感器、倉儲設備傳感器、閘門開度控制、氣缸位置控制、油缸位置控制等工業自動化位置與量程檢測系統。

拉繩位移傳感器的信號輸出方式
為數字信號輸出和模擬信號輸出,數字輸出型可以選擇增量旋轉編碼器、絕對值編碼器等,輸出信號為方波ABZ信號、正余弦信號、CANopen信號、自由RS485信號、MODBUS信號、Profibus信號或格雷碼/二進制信號,測量行程長(100~15000mm),精度高(~%FS),防護等級IP65。外殼和線輪均經過防腐處理,牽引繩為316不銹鋼繩,可以在惡劣的環境下(包括海水)工作??蛇x輸出方式有:電阻型、電壓型、電流型、增量脈沖型、絕對脈沖型。
模擬輸出型可以選擇精密電位器、霍爾編碼器、絕對值編碼器等,輸出信號可以為4-20毫安、0-5伏、0-10伏和電阻信號等,最大行程可以達到12500毫米,使用環境最大可以達到IP65的防護等級,-45℃~+105℃的寬溫度環境下使用。
拉線位移傳感器設計方案實例
傳統的拉線式位移傳感器采用電位器式位移傳感器,它通過電位器元件將機械位移轉換成與之成線性或任意函數關系的電阻或電壓輸出。普通直線電位器和圓形電位器都可分別用作直線位移和角位移傳感器。但是,為實現測量位移目的而設計的電位器,要求在位移變化和電阻變化之間有一個確定關系。
電位器式位移傳感器的可動電刷與被測物體相連,物體的位移引起電位器移動端的電阻變化。阻值的變化量反映了位移的量值,阻值的增加還是減小則表明了位移的方向。通常在電位器上通以電源電壓,把電阻變化轉換為電壓輸出。
傳統的拉線式位移傳感器由于其電刷移動時電阻以匝電阻為階梯變化,其輸出特性亦呈階梯形。如果這種位移傳感器在伺服系統中用作位移反饋元件的時,則過大的階躍電壓會引起系統振蕩。因此在電位器的制作中應盡量減小每匝的電阻值。同時,電位器式傳感器的另一個主要缺點是易磨損、分辨力差、阻值偏低、高頻特性差,從而導致測量精度的下降。它的優點是:結構簡單,輸出信號大,使用方便,價格低廉。
基于磁敏角度技術的拉線式位移傳感器以磁場為傳輸載體,將位移變換轉換為磁場角度位移,同時,通過通信接口將位移信號返回給應用系統。
1、總體設計方案
基于磁敏角度技術的拉線式位移傳感器的功能是將拉線的機械位移換成可以計量、記錄或傳送的電信號,主要由自動回復彈簧、輪轂、磁鐵以及數據處理單元等部分構成,結構如圖1所示。
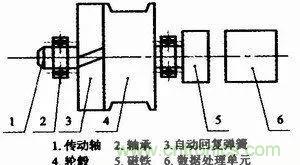
由圖1可以看出,該基于磁敏角度技術的拉線式位移傳感器主要由6部分組成,改變傳統的拉線式位移傳感器接觸式、易磨損、高頻特性差等缺點,基于磁敏角度技術的拉線式位移傳感器以磁場為媒介,將機械位移變化轉化為磁場角度變化,一方面解決傳統拉線位移傳感器的接觸方式,另一方面減少了磨損、提高了系統高頻特性,從而確保位移檢測精度。數據處理運算器,用于對接收到的磁敏角度信號通過數學模型運算為拉線的位移信號。通信接口,通過通信接口與應用系統的設備進行通信,接收來自應用系統設備的命令并將采集到的位移信號反饋給應用系統。從而提高了數據采集精度、穩定性和可靠性,降低了位移傳感器的應用門檻。
各個部件功能描述如下:
(1)拉線的鋼繩纏繞在輪轂上,輪轂與一個磁鐵連接在一起,當拉線產生位移的時候,帶動輪轂的轉動,輪轂的轉動造成與輪轂的軸連接的磁鐵轉動,從而磁鐵的磁場產生一個變化的角度。拉線運動發生的時候,自動回復彈簧確保拉線具備一定的張力,確保拉線的位移與磁敏角度的比例關系。
(2)磁敏角度感應器與磁鐵安裝在同一中心軸,用來感應磁鐵角度的變化,選用一種微處理器,該處理器讀取磁敏角度信息,并通過建立數學模型,將磁敏角度運算為拉線的位移。
(3)通訊接口,微處理器通過通信接口接收來自應用系統的命令并將位移信息通過通信接口返回給應用系統。
2、硬件接口電路設計
數據處理單元由磁敏角度感應器、微處理器單元、通信接口以及輸出模塊,具體的功能框如圖2所示。
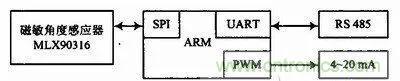
通過分析圖2,磁敏角度感應器選用MLX90316,它將拉線位移所導致的磁鐵磁場轉動的角度轉換為磁敏角度。微處理器單元選用32位嵌入式ARM用于對接收到的磁敏角度數據進行處理,完成磁敏角度數據的接收,由于接收到的是磁場轉換的角度,所以通過建立數學模型,結合輪轂的直徑等因素,將磁敏角度換算為拉線的位移。因此,為了能夠快速地實現數據的接收和模型的建立,此處選用LPC2136作為數據處理單元。輸入、輸出控制模塊負責各種對外接口的處理,如通過通信接口接收來自應用系統的命令,向應用系統返回采集的位移結果,以便能夠將微處理器單元能夠執行應用系統的命令并將采集結果通過接口安全可靠地發送到應用設備,主要包含1路的RS 485和4~20 mA的電流輸出。
2.1磁敏角度接收接口
MLX90316是一種線性霍爾芯片,采用了平面霍爾傳感技術的單片集成傳感芯片,該芯片可以用來測量與芯片表面共面的磁通密度,可以得到從0~360°的旋轉位置值,通過多種模式輸出準確度很高的線性絕對位置信號,并且成本低廉、安裝簡便。
MLX90316芯片前端是采用Triaxis霍爾技術的傳感器。由霍爾傳感器得到的二路正交的模擬信號經過放大處理后,經過14位微分型A/D轉換器進入芯片微處理器(DSP),再經過16位DSP處理之后的數字信號分3路輸出。MLX90316輸出具有12位角度分辨率,10位角度精度,并且在一定程度上可以避免外圍溫度變化對輸出精度的影響。MLX90316具有3種輸出:由12位D/A轉換為模擬量輸出;頻率為100~1 000 Hz的PWM輸出;數字模式下利用串行通信協議輸出(SPI)。
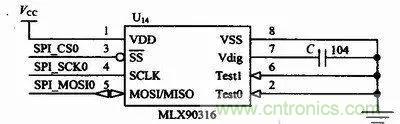
由于串行通信的輸出信號直接來自于MLX90316的內部DSP輸出,SPI輸出模式更穩定,誤差更小,并且具有更高的抗干擾能力。在本設計中,選用SPI接口,具體的硬件接口連接電路如圖3所示。在圖3中,MLX90316的SPI三根線與ARM LPC2136的SPl0口連接。SPI(SerialProtocol InterIace)總線接口是一種同步串行外設接口。這是一個4根信號線的串行接口協議,包括主、從兩種模式。這4根信號線分別是:時鐘線(SCK)、數據輸入線(MISO)、數據輸出線(MOSI)和從設備使能線(SS)。
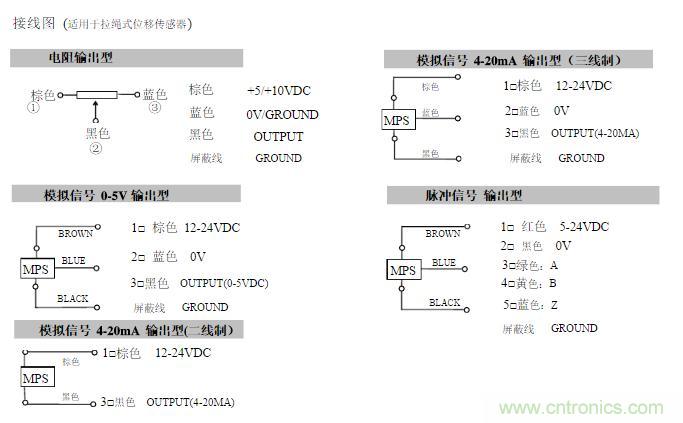
拉線位移傳感器接線圖如下:
以上就是關于拉線位移傳感器原理、設計方案、接線的知識介紹,賢集網小編友情提醒:位移傳感器安裝凸臺定位時,得用螺釘、螺母或壓板固緊在金屬板上。在安裝傳感器時,嚴禁對軸、殼體進行車、鉆等加工,避免軸或殼體受到外界的沖擊力和壓力,軸的軸向和徑向不允許受到沖擊力和壓力(靜壓力應小于300n)。嚴禁松動傳感器上的螺釘,轉動固緊環位置。位移傳感器的外部接線應焊接在引出端的腰槽處,盡量不要焊在引出端的頂部。焊接時應使用不大于45w電鉻鐵,焊接時間應小于5秒。在焊接及未冷卻透時不應拉動導線。
推薦閱讀:




