

【導讀】世界上有超過2萬種傳感器,而隨著人類工業的不斷發展,各種新的傳感器正在不斷被發明、被制造。萬物都有根源,雖然傳感器種類數以萬計,但其基本的感應方式大都是本文中的七類。你還知道哪些傳感器感應方式呢?
1、接近感應
接近感應通常意味著檢測:
a、是否存在物體。
b、對象的大小或簡單形狀。
接近傳感器在操作中可以進一步分為接觸式或非接觸式,以及模擬或數字。傳感器的選擇取決于物理,環境和控制條件。其中包括:
機械:
可以采用任何合適的機械/電氣開關,但是由于操作機械開關需要一定的力,所以通常使用微型開關。
氣動:
這些接近傳感器通過破壞或擾亂氣流來工作。氣動接近傳感器是接觸式傳感器的示例。但這些產品不能用于可能被吹走的輕型部件。
光學:
在最簡單的形式中,光學接近傳感器通過斷開光束而落下,該光束落在諸如光電池的光敏裝置上。這些是非接觸式傳感器的示例。
值得注意的是,這些傳感器的照明環境必須格外小心,例如,光學傳感器可能會因電弧焊過程中的閃光而被遮蔽,空氣中的灰塵和煙云可能會阻礙光的傳輸等。
電氣:
電接近傳感器可以是接觸式或非接觸式。簡單的接觸式傳感器通過使傳感器和組件形成完整的電路來進行操作。非接觸式電接近傳感器依賴于感應原理來檢測金屬或依靠電容來檢測非金屬。
范圍感應:
距離感測涉及檢測組件距離感測位置有多近或遠,盡管它們也可以用作接近傳感器。距離或距離傳感器使用非接觸式模擬技術。使用電容,電感和磁技術進行幾毫米至幾百毫米之間的短距離感測。使用各種類型的已發射能量波(例如,無線電波,聲波和激光)執行更遠距離的感應。
2、力感測
可能需要感應的力有六種。在每種情況下,力的施加可以是靜態的(靜止的),也可以是動態的。力是矢量,因為它必須同時在大小和方向上指定。因此,力傳感器是模擬操作,并且對其作用方向敏感。六種力量是:
①、拉力
②、壓縮力
③、剪力
④、扭轉力
⑤、彎曲力
⑥、摩擦力
存在用于感測力的多種技術,一些是直接的,一些是間接的。
拉伸力:
可以由應變計確定,當長度增加時,它們會顯示出其電阻的變化。這些量規測量的電阻變化可以轉化為力,因此是間接裝置。
壓力:
可以通過稱為稱重傳感器的設備來確定,這些設備可以“通過檢測壓縮負載下電池尺寸的變化,或者通過檢測負載下電池內壓力的增加,或者通過在壓縮負載下電阻的變化來運行”加載。
扭轉力:
可以看作是拉伸力和壓縮力的組合,因此可以采用上述技術的組合。
摩擦力:
這些涉及要限制運動的情況,因此“通過使用力和運動傳感器的組合間接檢測摩擦力。例如:
3、觸覺感應
觸感是指通過觸摸進行感測。最簡單的觸覺傳感器類型使用以行和列排列的簡單觸摸傳感器陣列。這些通常稱為矩陣傳感器。
每個單獨的傳感器與物體接觸時都會被激活。通過檢測哪些傳感器處于活動狀態(數字)或輸出信號的大小(模擬),可以確定組件的印記。然后將壓印與先前存儲的壓印信息進行比較,以確定組件的大小或形狀。
目前已實現機械,光學和電子觸覺傳感器。
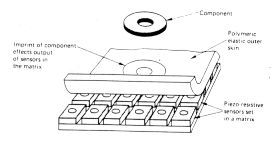
觸覺矩陣傳感器
4、熱感
作為過程控制的一部分或作為安全控制手段,可能需要進行熱感應。有多種方法可供選擇,這些方法的選擇主要取決于要檢測的溫度。
一些常見的方法是:雙金屬條,熱電偶,電阻溫度計或熱敏電阻。對于涉及低水平熱源的更復雜的系統,可以使用紅外熱像儀。
5、聲音感應(聽力)
聲學傳感器可以檢測并有時區分不同的聲音。它們可用于語音識別,以發出口頭命令或識別異常聲音,例如爆炸。最常見的聲學傳感器是麥克風。
在工業環境中,聲學傳感器的明顯問題是大量的背景噪聲。可以很容易地將聲學傳感器調整為僅對某些頻率做出響應,從而使它們能夠區分不同的噪聲。
6、氣體感應(氣味)
對特定氣體敏感的氣體或煙霧傳感器依賴于傳感器中所含材料的化學變化,化學變化會產生物理膨脹或產生足夠的熱量來觸發開關設備。
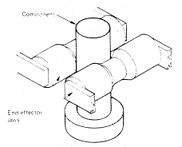
7、機器人視覺(瞄準器)
視覺可能是當前機器人感覺反饋研究中最活躍的領域。
機器人視覺是指通過某種相機實時捕獲圖像并將該圖像轉換為可以由計算機系統分析的形式。這種轉換通常意味著將圖像轉換成計算機可以理解的數字場。圖像捕獲,數字化和數據分析的整個過程應足夠快,以使機器人系統能夠響應分析的圖像并在執行任務集期間采取適當的措施。
機器人視覺的完善將使人工智能在工業機器人上的全部潛能得以發揮。它的用途包括檢測存在,位置和移動,識別和識別不同的組件,樣式和特征。
但是,即使是最簡單的視覺技術也需要大量的計算機內存,并且可能需要相當長的處理時間。
免責聲明:本文為轉載文章,轉載此文目的在于傳遞更多信息,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請聯系小編進行處理。
推薦閱讀:




