

【導讀】 我們可能都見到過這樣一種情況,需要隨時間變化掃描頻率。如果您遇到這樣的問題,可以考慮應用雷達等方法,在這類應用中目標不僅可以把發送出去的信號反射回來,而且還能夠與接收到的信號進行對比。
觀察頻率 (Df) 差異,我們可確定信號返回所需的時間 (Dt)。知道該時間后,我們就可以算出與目標的距離。如果讓線路的斜率更陡,那么系統對噪聲的敏感度就會降低,但這樣做的代價是縮小了覆蓋范圍。
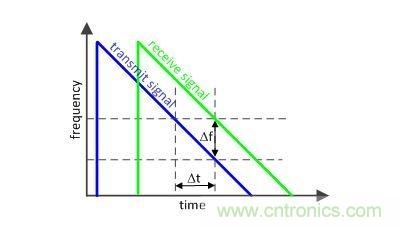
圖1:頻率差異的對比
對于雷達應用而言,重點是要讓圖中產生的波形具有極高的線性度與恒定斜率,以避免頻率計算錯誤。在允許較高非線性度的應用中,可使用數模轉換器 (DAC) 來調節電壓控制振蕩器 (VCO) 的控制電壓,以生成所需的波形。該開環方案的一個難點是波形的斜率會受到部件間變化、溫度、VCO 頻率漂移以及 VCO 頻率提供推頻的影響。
對于需要更好線性度的應用,可選用鎖相環 (PLL)(例如 LMX2492)方案通過在反饋分頻器中添加部分調制功能來創建波形。下圖是實際測量結果,其著重解決從 9850 至 9400MHz 的 45us 頻率線性調頻挑戰。頻率突變會導致過沖與周跳,但通過將器件編程至 9800MHz 并保持 5us,然后繼續斜坡變化,可減少該問題。通過使用下圖所示的這種雙斜坡方案,可提高性能。
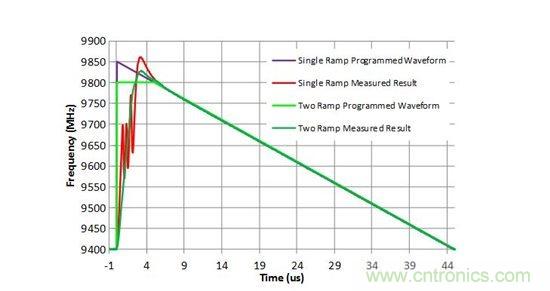
圖2:雙斜坡方案中的頻率變化
除了使用額外頻率斜坡改善波形線性度以外,它們還可用來創建更復雜的波形。例如下圖 所示,雙斜坡方法可用來計算移動目標的多普勒轉換。
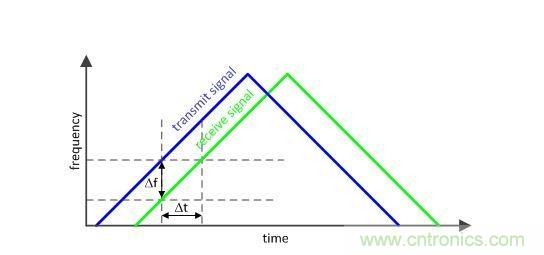
圖3:多普勒轉換
相關閱讀:
提供領先相位噪聲性能的4GHz PLL頻率合成器
運用在PLL上LC諧振頻率的測試原理
PLL的電源管理設計




