

【導讀】在為感性負載設計驅動電路時,需要考慮尺寸、成本、開關速度、可靠性、功耗和散熱等因素。本文討論了如何利用繼電器和電磁線圈來節省功耗。繼電器或電磁線圈等感性負載需要一定的電能去激勵負載,一旦完成激勵,所需的電能就可以降低,而負載仍保持激活狀態。
在選擇一種特定的設計方法時需要考慮諸多因素,而且這些因素相互間并不總是獨立的。在為感性負載設計驅動電路時需要考慮尺寸、成本、開關速度、可靠性、功耗和散熱等。諸如繼電器或電磁線圈等感性負載有別于簡單的阻性或容性負載,它們需要一定的電能去激勵負載,一旦完成激勵,所需的電能就可以降低,而負載仍保持激活狀態。低電流的額外好處是可以在較短時間使負載停止工作。
我在以前發表的博客文章“反電動勢和緩沖器”中,我討論了開關型感性負載的一個方面,建議你跟隨我的思路,繼續有關緩沖器的討論。不管你是否選擇斷開感性負載的電源,反電動勢(back-EMF)總是存在的。
在應用以下技巧時,并不是所有感性負載的數據手冊都能提供足夠的信息。事實上,在我為這篇博客搜集資料時,幾乎沒發現哪個數據手冊上有這樣的信息。然而,SchrackRT2系列繼電器提供了很好的例子。正如你看到的,在拉電壓、繼電器以及保持負載處于激活狀態的要求之間有很大的差異。
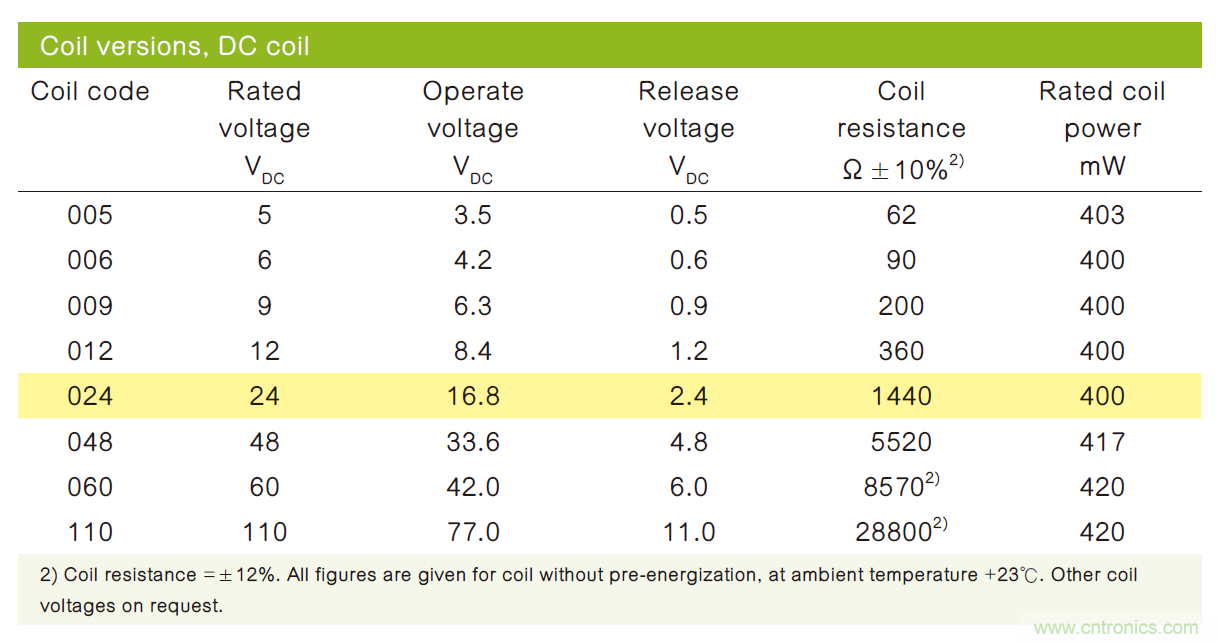
圖1:高亮顯示的是RTE24024參數。盡管夠詳細了,但數據手冊中沒有地方提及絕對最大線圈電壓。(來源:TE Connectivity)
信息的缺失意味著你做的幾乎所有設計都只能是“試試再說”。一旦你真正確定想要使用的方法和量值,就得考慮由于生產擴張、電壓變化和溫度/濕度改變而造成的量值變化。如果可能的話我還是建議選用提供參數的產品。
控制感性負載要求調節線圈上的電壓或改變電流。如果你想全部自己做,可以采用下面這些方法。圖2只是概念性的顯示,對雙極型結晶體管(BJT)來說在晶體管基礎上必須有一個限流電阻,在A圖中沒有指明轉換觸點的電子控制機制。
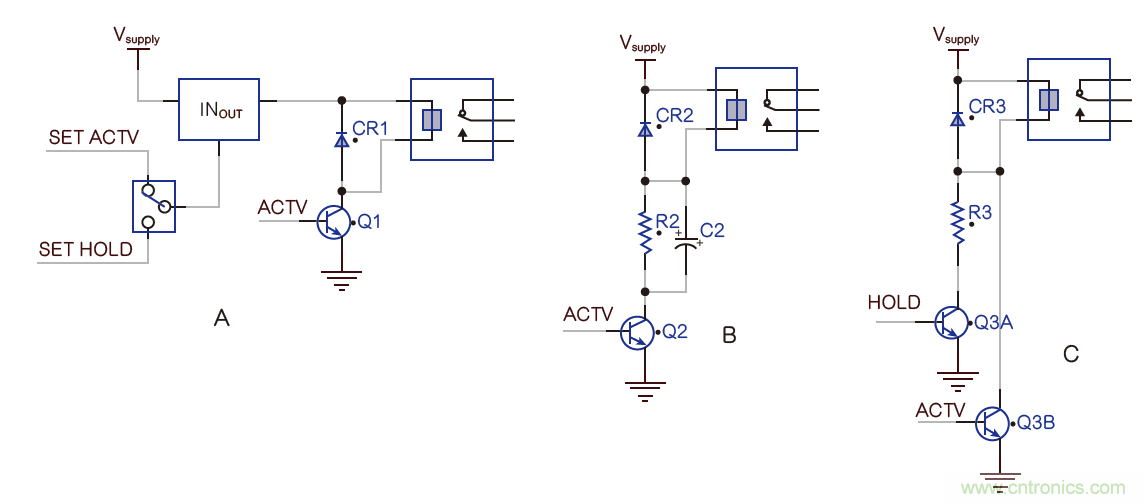
圖2:直接調整線圈供電電壓的基本方法。
如果你能控制電源,就可以使用圖2A所示的方法。仔細看一下下面列出的設計實例,會發現這是最通用的方法。事實上,你可以使用第二組觸點反饋觸點閉合來觸發這種轉換。通常人們使用整流和平滑的電源而不用穩壓電源。然而,主電壓和放大器制造方面的變化意味著你必須允許寬的容差才能適用于小批量生產,但我更愿意選用大批量生產和很大的余量。如果使用多個獨立線圈也很不方便。
圖2B展示的是一種很常見的技術。當線圈通過晶體管Q2得到激勵時,電容C2相當于短路,整個電壓施加于負載之上。C2根據電路的時間常數(C2的值和線圈的電阻)進行充電,線圈上的電壓逐漸降低。這個電壓將穩定在由線圈內阻和R2組成的電阻分壓器確定的電壓值。這種方法雖然簡單,但有一些缺點。一般來說,電容都有一個很大的值,因為元件的容差和溫度特性因素,實際下降穩定時間會有比較大的差異。另外,在穩定狀態下R2也會有功耗,那個電阻可能要很大,可能會發熱。
如果微處理器還有額外的輸出,那么作為圖2B改進版的圖2C可以節省浪費的空間和時序不確定的電容,代價是再用一個晶體管(Q3A)。為了激勵負載,需要使Q3A和Q3B導通。一旦完成激勵(根據時間或閉合觸點的確認),Q3B就可以停止工作了。
要解決從數字域轉變到模擬域的任何問題,推薦解決方案是PWM。通過改變開關波形導通的比例,我們可以調節平均電壓以及平均功率。沒有額外的電阻要散熱,也沒有額外的電容會浪費空間或搞亂時序。
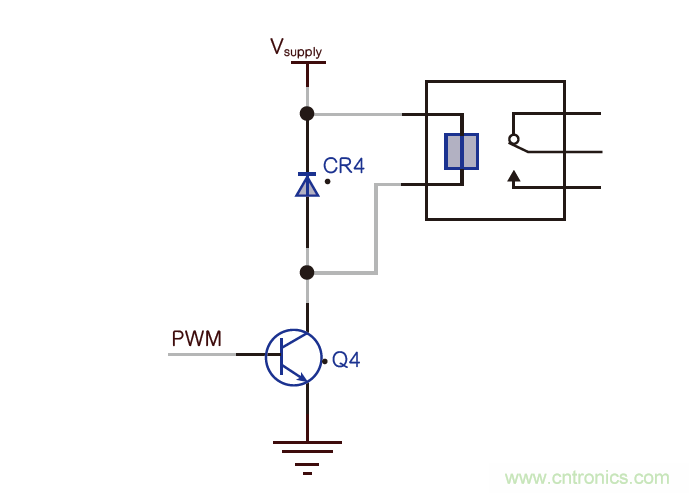
圖3:用于連接PWM驅動的簡單電路連線示意圖。
我們可以創建一個獨立的PWM信號,然后用起始信號加以選通,這樣需要兩個引腳來控制負載,但如果認為現代微控制器不能用一個引腳實現從0到100%的PWM就太天真了。若是感性器件制造商能夠提供有關實現可靠操作的細節就再好不過了。我不能確定這是否普遍,不過ASCO等制造商就專門為了這個目的而生產器件,如圖4所示。總算得到可以保證的性能!
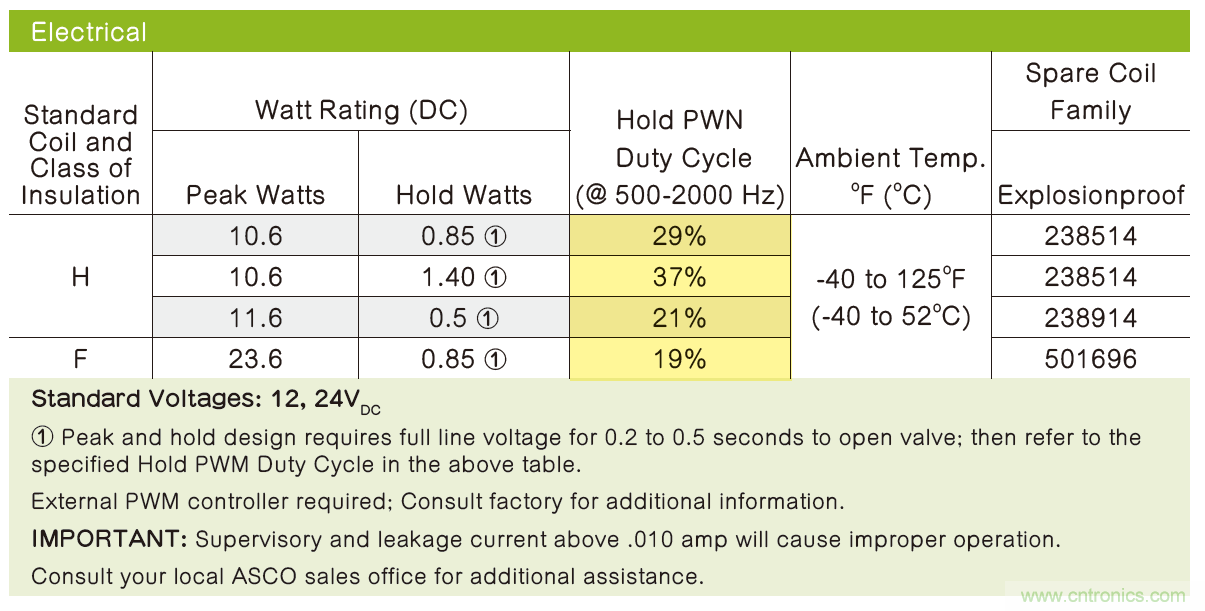
圖4:摘自ASCO HV427246氣體關閉閥數據手冊。(來源:ASCO)
至此我只討論了電壓的控制,你可以通過控制電流達到同樣的目的。要實現用分立元件做電流控制器太費勁了,但是有一個很簡單的解決方法。有一些IC能夠做到這點!
最直接的是英飛凌公司的恒流雙通道繼電器驅動器TLE7241,英飛凌也有六通道的器件TLE6288R,以及另外一個器件——用于線性電磁線圈的TLE82453。
TI公司則有DRV120。美信公司提供8通道的驅動器MAX4822-4825。我還剛剛發現了一家以前從未聽過的IC制造商iC Haus,該公司生產3種節能型繼電器/電磁線圈驅動器。
有關這次討論的最后提示:你選擇的繼電器/電磁線圈也會對功耗有很大的影響。如果選擇自鎖繼電器,那么在穩定狀態功耗會降至零。制造商設計的“敏感性”元件只需較小的電流就能激活。
你還需要仔細考慮器件的等級。有些器件規定用于臨時性操作,因此不適合想要降低功耗的長期工作環境。當制造商不提供數據時,反復試驗后再將結果應用到生產是很有必要的。最后提醒一點,采用這種節能方法有一個不太明顯的副作用,在高振動/沖擊環境下電能可能不足以使繼電器/電磁線圈保持激活狀態。
后記
在寫這篇博客時,我在一個已經啟動的項目中使用了圖4所示的器件。在2個月內我又啟動了另一個項目,使用了類似于圖5中數據的電磁線圈。不僅數據手冊中缺少關鍵參數(比如絕對最大電壓),Guardian公司還完全不提供技術支持。我的客戶說這是一個1A的電磁線圈,最大激活時間是4s,否則它會過熱。
這次沒有任何有關怎樣PWM驅動器的信息。
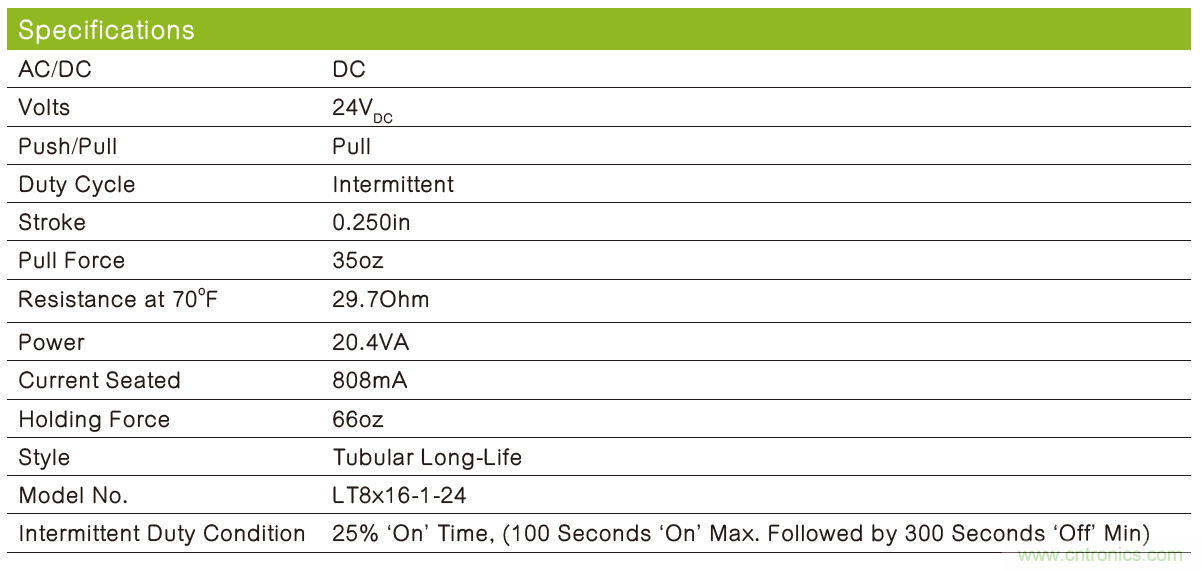
圖5:Guardian Electric公司提供的電磁線圈標記為LT8X16-29.7-24VDC。這是我在Guardian網站上發現的最近似產品。(來源:Guardian Electric公司)
我審閱了一下上面的內容。我想要PWM方法,而我的描述有點老套——你會如何真正去確定起始脈沖,并保持PWM和頻率。我建議你使用能方便調整參數的配置——我使用的是賽普拉斯公司的PSoC5LP開發套件,它有一個電位計、一組開關和LED,以及一大堆I/O。
幸運的是,這種電磁線圈和連接裝置是完全可見的,因此我可以看到真實發生的事情。
我的設計會提供一個脈沖來激活電磁線圈。我寫了一個小程序來讀取電位計的設置,并將它轉換為導通時間。從大概1s的位置開始,然后退回來看電磁線圈停止拉入的地方。令人驚訝的是時間很短,不到100ms。我將脈沖寬度設為150ms。然后將微處理器的啟動脈沖配置為150ms,并轉換為PWM。我為PWM信號選擇了一個2kHz的頻率,然后根據電位計的位置重寫程序來調整PWM設置。接著嘗試激活電磁線圈,并在每次嘗試時退回到PWM,看看它何時退出。試驗表明,激勵晶體管的速度是限制因素,它在PWM小于10%時無法跟上,因此有效極限是10% PWM(見圖6)。
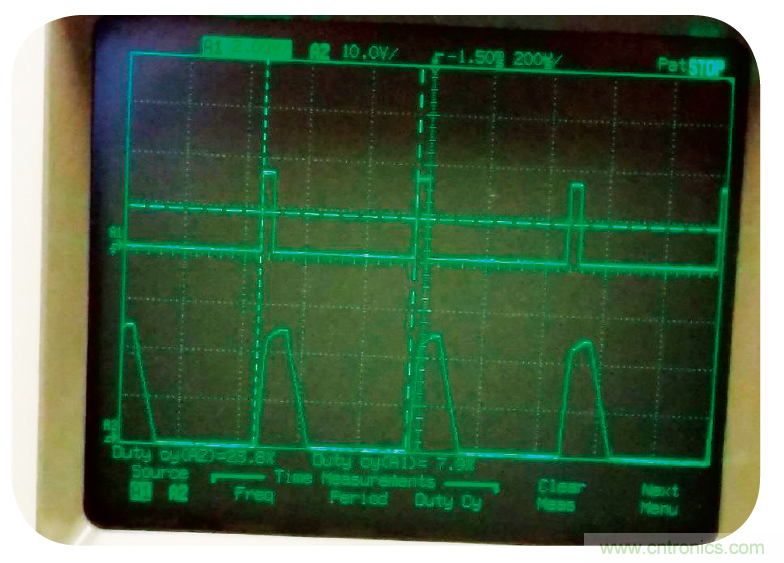
圖6:上方是微處理器產生的PWM,下方是驅動晶體管的輸出。PWM約為8%,可以看到由于驅動器響應的原因,有效輸出曲線是如何變得更多的。
在2kHz時可以聽得到嘯叫。將頻率提高到4kHz,驅動器又不能順暢工作,因此只好回退到2kHz。我認為在實際應用中這不會有問題,不過還是讓時間來證明吧。
總之,我得到了一個150ms的啟動脈沖、一個2kHz的PWM信號和10%的PWM。電流從大約800mA降低到76mA。還不錯!
本文轉載自電子技術設計。
推薦閱讀:



